

총 6 건
-
 BGA(Ball Grid Array) 검사에 적합한 고정밀 3D 센서 스캐너 XCS 시리즈
BGA(Ball Grid Array) 검사에 적합한 고정밀 3D 센서 스캐너 XCS 시리즈BGA(Ball Grid Array)는 전자기기에서 널리 사용되는 반도체 패키징 기술 중 하나입니다. BGA는 격자 모양으로 솔더가 부착되어 높은 연결 밀도와 열 방출 효율을 제공하며, 패키지 크기로 인해 현대의 고성능, 고밀도 전자기기에 사용됩니다. BGA는 납땜 공정과정에서 부착된 솔더 볼의 열(Array)이 정확하고 일정하며 고르게 부착되어야 합니다. BGA의 솔더 볼은 패키지의 전기적 및 기계적 연결을 제공해야 하기 때문에 불량이 일어날 경우 전자기기의 기능 저하시키며 잦은 고장과 오류를 초래할 수 있습니다. 이는 특히, 고속 데이터 전송이 필요한 어플리케이션에 치명적일 수 있습니다. 그러므로 제조 과정에서 BGA 검사를 통해 솔더 볼의 정확한 배열과 부착상태를 확인하여 전자기기의 선능을 보장해야 합니다. AT(Automation Technology)사에서 출시한 XCS 시리즈는 이러한 볼 그리드 어레이(BGA) 검사의 정밀도 측면에서 뛰어난 검사 혁신 솔루션을 제공합니다. AT – Automation Technology Automation Technology는 맞춤형 3D 특수 이미징 센서 기술을 전문으로 하는 선도적인 글로벌 기술 기업입니다. AT는 지능형 적외선 카메라, 고정밀 3D 센서를 개발하고 제조해왔습니다. AT(Automation Technology)사에서 2024년 고정밀 검사를 위해 출시한 신규 라인업 XCS 는 기존 3D 센서 C6 시리즈에서 새로 추가된 시리즈로 정밀성, 신뢰성 및 반복성이 요구되는 고성능 산업용 어플리케이션을 위한 고정밀 3D 센서 시리즈입니다. Automation Technology C6 센서 시리즈 Automation Technology 의 3D C6 시리즈는 GigE Vision/GenICam 3D를 1Gbit/s로 지원하는 센서 플랫폼을 기반으로 제작되었습니다. C6 레이저 시리즈는 매우 빠르고 정밀한 해상도를 제공합니다. - Automation Technology XCS 시리즈 - Automation Technology XCS Model 레이저 라인 프로젝션(Projection): 레이저를 선 모양의 광원으로 물체의 표면에 투사하는 기술. 표면의 형상이나 결함을 정밀하게 측정하고 분석할 수 있음 xcs 시리즈 어플리케이션 XCS 시리즈는 균일한 두께를 유지하여 가장 작은 결함도 감지할 수 있는 최적화된 레이저입니다. XCS 3D 모델에 따라 XCS 3D 센서는 최대 140kHz의 프로파일(검사) 속도와 최대 53mm의 FOV를 제공합니다. 또한 선택 가능한 듀얼 헤드 옵션은 가림 현상(Occlusion,blind spots)을 제거하고 효율성을 높입니다. | 센서 모델 XCS 시리즈는 광삼각법 원리를 기반으로 작동하며 레이저 다이오드에서 방출된 빛이 물체에 투사되고 반사되어 센서로 돌아오는 정보를 바탕으로 물체의 깊이, 거리, 형상을 측정하는 3D 데이터를 생성합니다. 1 3070 WARP 센서로 가능한 가장 빠른 검사 속도 XCS 센서의 3070 WARP 버전은 최대 140kHz의 프로파일 속도를 달성하여 3D 스캔의 데이터 볼륨을 특히 빠르고 효율적으로 분석할 수 있습니다. WARP 센서는 Automation Technology사에서 자체 개발한 기술로 가장 빠른 3D 프로파일링을 제공하는 고성능 3D 센서입니다. 초고속의 프로파일 속도 Automation Technology의 WARP(Widely Advanced Rapid Profiling)* 기술로 최대 200kHz의 프로파일* 속도를 구현합니다. 이를 통해 빠른 생산 라인에서도 고속으로 데이터를 수집하고 처리합니다. 연관 데이터 전송 자체 개발한 센서 칩과 데이터 처리 덕분에 3D 스캔 중 필수 데이터만 전송하고 불필요한 데이터 전송을 줄여 효율성을 높입니다. 이 새로운 기술 덕분에 기존보다 최대 10배 더 높은 측정 속도를 구현합니다. 프로파일 (Profile): 센서가 특정 시간 동안 측정하거나 스캔할 수 있는 데이터 포인트 개수 의미. WARP는 Widely Advanced Rapid Profiling의 약자로, 레이저 센서의 데이터 수집 속도를 크게 향상시킵니다. 200kHz의 프로파일 속도는 레이저 센서가 1초에 200,000개의 단면을 캡처할 수 있다는 의미입니다. 즉, 200kHz 속도로 빠르게 데이터를 수집합니다. 3070W 센서에는 이미지의 모든 열에서 레이저의 반사를 찾아내, 레이저 반사가 일어난 위치 전후의 몇 픽셀 데이터만 읽어 들입니다. 이는 전체 이미지를 읽는 대신 특정 부분만 읽음으로써 속도를 높입니다. 즉, ROI(region of inspection, 검사 영역)의 모든 픽셀을 FPGA*로 전송하여 추가로 처리를 하는 대신, WARP기능으로 불필요한 데이터 전송을 줄이고 보다 효율적으로 실시간으로 데이터를 전송합니다. 2 듀얼헤드 옵션으로최대 140Khz 프로파일링 속도 달성 XCS 센서는 듀얼 헤드 옵션을 통해 가림 현상(Occlusion,blind spots)을 제거하고 초고속으로고해상도 3D 스캐닝 결과를 제공합니다. - 듀얼헤드, 두개의 센서가 주는 이점 - 1 폐쇄 제거 및 복잡한 형상 스캔 2 높은 해상도와 정밀도 제공? 3 속도 향상 두개의 센서를 사용하면 서로 다른 각도에서 데이터를 수집합니다. 이는 한쪽 센서에서 볼 수 없는 물체의 부분을 다른 한쪽에서 스캔하고 데이터를 수집하여 완전한 3D 모델링을 생성할 수 있습니다. 또한 두 개의 센서가 동시에 데이터를 수집하므로, 한 번의 스캔으로 더 많은 정보를 얻으며 한 개의 센서 보다 정밀한 데이터를 수집합니다. 즉, 해상도를 높이고 더 정밀한 3D 스캔 결과를 얻을 수 있습니다. XCS의 듀얼헤드 모델은 스캔 프로세스를 가속화하므로 고속 생산 라인에서 매우 유용합니다. 3 고품질 레이저 라인 프로젝션으로 높은 정밀도와 반복성 제공 일반적인 레이저 라인은 중심에서 가장자리로 갈수록 두께가 변할 수 있습니다. 그러나 XCS 센서는 레이저 프로젝터의 특수 광학 장치를 통하여 균일한 두께의 레이저 라인을 유지합니다. 다시 말해, XCS 시리즈는 두께 변화를 최소화하며 균일한 레이저 라인으로 전자 부품 같은 작은 구조도 높은 반복성과 정확도로 정밀하게 스캔합니다. 또한 Automation Technology사에서 자체 개발한 Clean Beam 기능을 통하여 여러 외부 간섭으로부터 레이저를 보호하여 레이저 빔이 매우 정밀하게 집중되도록 합니다. *외부 간섭 요인이란 주변 광원(예: 태양빛, 인공 조명), 다른 전자기 신호, 먼지나 연기 같은 공기 중 입자 등이 포함됩니다. 이러한 요인은 센서가 정확한 데이터를 얻는 데 방해가 될 수 있습니다. XCS의 Clean Beam 기능을 사용하면 레이저 광이 더 정확하게 물체에 닿고, 반사된 광이 센서로 돌아올 때 외부 간섭의 영향을 덜 받게 되어 스캔 결과의 신뢰성과 일관성을 높이게 합니다. Clean beam 기능은 듀얼헤드 옵션의 효과를 극대화 할 수 있습니다. 듀얼 헤드 옵션과 Clean beam 기능이 결합되면 외부 간섭 없이 레이저 빔의 균일한 강도를 집중시키며 동시에 가림 현상(Occlusion,blind spots) 없는 고유한 3D 스캔 결과를 제공합니다. 4 최대 53mm의 시야각으로 전자 검사(BGA 검사 등)에서 탁월한 광학 해상도 제공 XCS 센서는 최대 2.08인치(53mm)의 매우 작은 Fov를 가집니다. XCS 시리즈의 4090 모델일 경우 53mm FOV, 프로파일당 4096픽셀, 최대 20.3Kh 프로파일 속도를 제공합니다. Optical Setup 4090 XCS 모델을 통해 작은 FOV로 얻게 되는 이점은 반복성이 높고 정확도가 뛰어난 검사 어플리케이션을 개발할 수 있다는 것입니다. 이는 전자부품 검사, 전자 어셈블리 검사, 커넥터 핀 검사 등에 최적화된 솔루션입니다. xcs 시리즈 어플리케이션 5 BGA 검사와 같이 작고 정밀한 검사에 적합한 XCS 3D 센서 지금까지의 모든 기능들을 바탕으로 XCS는 볼 그리드 어레이(BGA) 외관 검사를 통해 BGA의 다양한 불량 유형 검사를 매우 정밀하고 균일하게 진행할 수 있습니다. - XCS 3D 센서 시리즈의 외관 검사에 적합한 BGA의 주요 불량 유형 - 위 내용의 불량 검출 유형을 바탕으로 XCS 센서는 BGA에 부착된 솔더볼의 높낮이를 정밀하게 스캔하여 불량 유형을 검출할 수 있습니다. 예를 들어 듀얼 헤드 옵션으로 다양한 각도에서 솔더볼을 스캔하여 폐색 없는 정확한 3D 이미지를 생성합니다. Clean Beam 기능으로 균일한 레이저 라인을 제공하여 스캔의 정밀도와 반복성을 보장합니다. 마지막으로 3070 WARP 센서로 최대 140kHz의 프로파일링 속도로 빠르게 3D 데이터를 생성하여 공정에서의 택타임*을 효율적으로 관리하며 불량 유형 검사를 진행합니다. *택타임(Tact time): 정해진 작업 시간 안에 고객이 요구하는 제품 수량을 생산하는 데 걸리는 시간 Automation Technology사의 XCS의 더 자세한 내용이 알고 싶으시다면 화인스텍에게 문의주세요!
2024.08.12 -
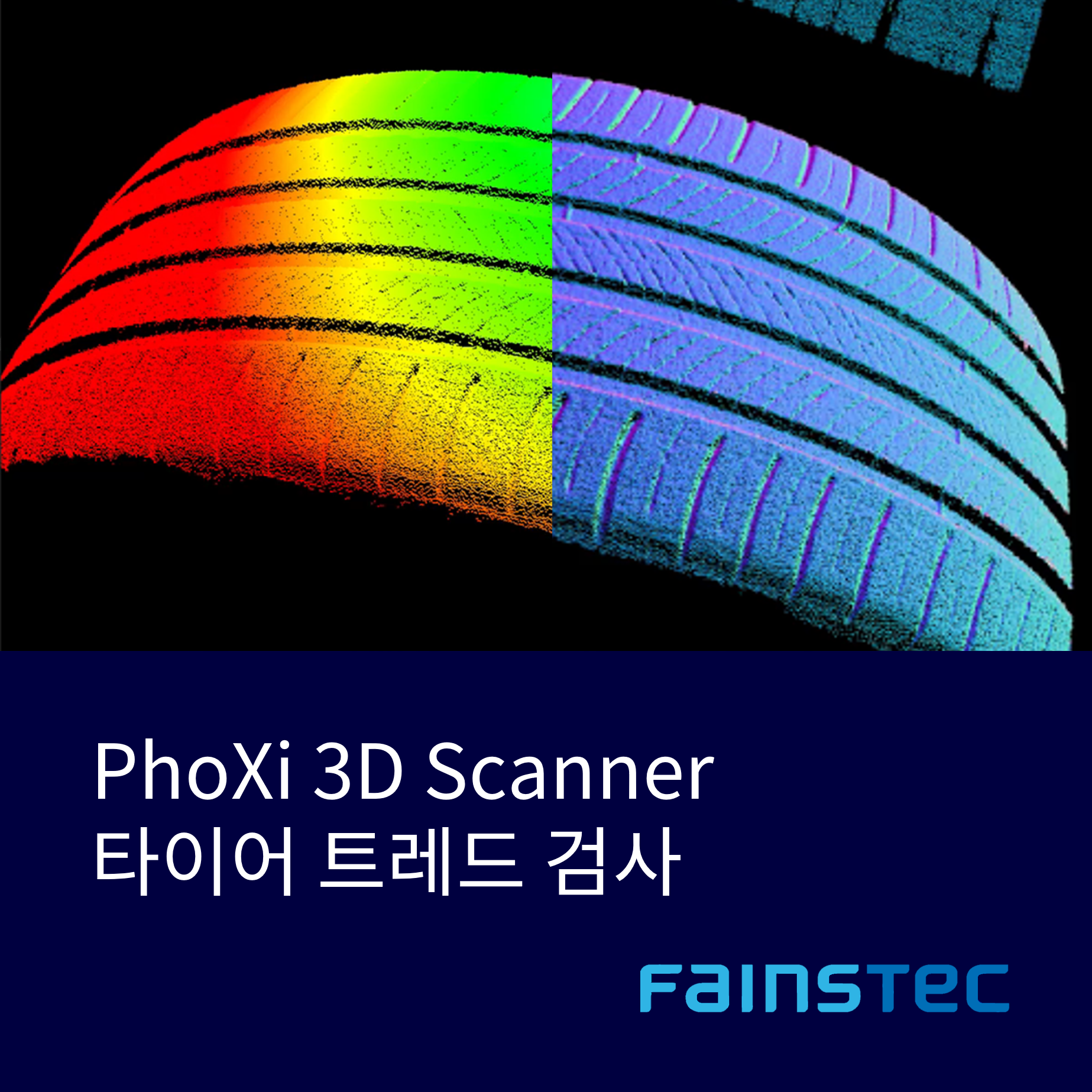 [화인스텍] 포토네오(Photoneo) PhoXi 3D 산업용 스캐너로 타이어 트레드 검사
[화인스텍] 포토네오(Photoneo) PhoXi 3D 산업용 스캐너로 타이어 트레드 검사타이어는 차량의 안전성과 성능에서 핵심적인 역할을 하며, 제조 과정에서의 품질 관리가 필수적입니다. 이 과정에서 산업용 3D 스캐닝 기술은 일관된 기준으로 타이어를 검사하여 결과의 신뢰성을 높이고 체계적인 품질 관리를 지원합니다. 3D 카메라를 통한 타이어 생산 공정에서의 검사는 정밀한 품질 관리, 불량 제품 식별, 생산 효율성 향상, 그리고 제조 표준 규격 준수에 필수적입니다. 특히, Photoneo의 PhoXi 3D Scanner는 타이어의 외관 검사, 내부 구조 검사, 균형 검사, 트레드 균일성 검사, 제조 공정 모니터링에서 뛰어난 성능을 발휘합니다. <머신비전 솔루션을 활용한 타이어 외관검사 어플리케이션> 이러한 타이어 검사의 높은 정밀성과 효율성을 구현하기 위해, 산업용 3D 스캐너가 제조 공정에서 필수적인 도구로 자리 잡고 있습니다. 화인스텍의 공식 파트너사 포토네오(Photoneo)의 PhoXi 3D 스캐너의 고해상도 3D 데이터 캡처와 빠른 스캔 속도는 타이어의 결함과 상태를 정밀하게 측정하고 분석하며, 다양한 환경에서도 안정적인 성능을 발휘하는 견고한 설계를 갖추고 있습니다. <타이어 외관 검사에 적합한 산업용 3D 스캐너_PhoXi 3D Scanner> 이러한 기술적 장점 덕분에 다양한 머신비전 기반 타이어 검사 기능이 효과적으로 구현될 수 있습니다. PhoXi 3D 스캐너는 3백만 개의 3D 포인트로 구성된 고해상도 데이터를 제공하며, 실시간으로 움직이는 물체를 정확하게 스캔하는 뛰어난 기능을 갖추고 있습니다. PhoXi 3D 스캐너를 실제 어플리케이션인 타이어 검사에 적용해 보았습니다. 다양한 타이어 검사 중 타이어 트레드의 깊이와 폭을 검사하였으며, 고정된 위치에서의 깊이 및 폭 측정에 집중해 보았습니다. * PhoXi 3D Scanner가 위에서 타이어를 스캔하는 모습 Photoneo 프로그램으로 확인할 수 있는 데이터 다양한 컬러 표현을 지원하는 Photoneo 프로그램을 사용하여, 스캔 된 데이터를 시각적으로 확인할 수 있습니다. Photoneo 프로그램은 파라미터 설정, 이미지 확인 및 저장 기능을 제공하여, 스캔 된 3D 데이터를 효과적으로 다룰 수 있도록 합니다. PhoXi 3D 스캐너로 캡처한 타이어의 3D 모델을 시각적으로 분석한 결과를 볼 수 있습니다. 화면에서 스캔 된 타이어의 트레드 깊이와 폭 측정을 통해 타이어의 세부 상태를 확인할 수 있습니다. 또한, 3D 스캔을 통해 얻은 데이터를 처리하여 포인트 클라우드를 생성하고 이를 바탕으로 3D 모델링을 수행한 결과를 확인할 수 있습니다. 아래 사진을 클릭해보세요! ↓↓↓↓↓↓↓↓↓ Phoxi 3D Scanner L size SPECIFICATIONS Photoneo PhoXi technical parameters PhoXi 3D 스캐너는 실시간으로 움직이는 물체를 정확히 스캔할 수 있는 기능 덕분에, 타이어 제조와 검사뿐만 아니라 아래와 같은 다양한 어플리케이션에 적용될 수 있습니다. *사진을 클릭하여 3D 모델링 결과를 확인해 보세요! 가장 작은 부품 검사 PhoXi 3D 스캐너 XS는 161~205mm의 스캔 범위 내에서 작은 물체를 높은 정밀도로 스캔할 수 있도록 설계되었습니다. 높은 정확도와 세부 수준을 제공하는 XS 모델은 물체와 재질 검사에 가장 적합한 선택입니다. 큰 물체 검사 PhoXi 3D 스캐너 XL은 1680~3780mm의 스캔 범위 내에서 매우 큰 물체를 스캔하는 데 적합합니다. 광택, 반사 또는 검정색 표면이 겹쳐져 있는 다양한 상자 종류가 적재된 화물의 디팔렛타이징과 같은 여러 응용 분야에서 사용할 수 있습니다. 정확한 유기물 인식 PhoXi 3D 스캐너는 식품 업계에서 과일, 야채 또는 생선과 같은 유기물 물체를 스캔할 때 사용할 수 있습니다. 가장 복잡한 물체도 척척 노이즈 필터링에 대한 고급 알고리즘 덕분에 PhoXi 3D 스캐너는 반짝이거나 반사되는 재질에서도 (톱니바퀴와 같은 금속 물체) 스캔하고 검사할 수 있습니다. 메디컬 케어 PhoXi 3D 스캐너는 인체 스캔과 같은 의료 산업에도 적용가능한 어플리케이션입니다. 상이한 표면 스캔을 한번에 PhoXi 3D 스캐너는 표면이 서로 다른 다양한 종류의 물체가 있는 복잡한 장면도 스캔 한 번으로 포인트 클라우드를 확보할 수 있습니다. PhoXi 3D 스캐너에 대해 더 자세히 알고 싶거나, 제품 구매 및 상담을 원하신다면, 화인스텍을 방문해 주시기 바랍니다.
2024.08.07 -
 3D 스캐너 / 소프트웨어 조합으로 캔음료 검사하기
3D 스캐너 / 소프트웨어 조합으로 캔음료 검사하기그림 1: AT 3D센서는 캔 뚜껑의 곡률을 스캔하고 3D 포인트 클라우드 데이터를 생성합니다. (사진제공 AT - Automation Technology) 한 글로벌 음료 제조업체는 음료 충전 및 뚜껑 밀봉 과정에서 발생하는 캔 뚜껑의 곡률 결함으로 인한 공정 중 가동 정지 시간을 줄이고 품질 관리 개선을 위해 캔 압력 검사가 필요했습니다. 이러한 가동 중지 시간을 없애고 공정을 최적화하여 생산량을 늘리기 위해 제조업체는 캔 압력을 검사하는 어플리케이션을 개발하려고 했습니다. 하지만 문제는 3D 스캐너를 사용하여 컨베이어 벨트에서 최대 속도로 이동하고 있는 캔의 압력을 바로 검사하는 것이었습니다. AT – Automation Technology(독일 Bad Oldesloe, www.automationtechnology.de) 및 EVT – Eye Vision Technology (독일 Karlsruhe, www.evt-web.com)는 이와 같은 어플리케이션에 대한 3D 솔루션을 제공해 드리고 있습니다. 과정 소비자가 음료가 들어 있는 캔을 열면 음료가 탄산이든 아니든 간에 쉬익 소리가 납니다. 그 쉬익 소리는 그냥 나는 것이 아닙니다. 이 소리를 통해 캔이 적정한 충전량과 충전 압력으로 채워져 있는지를 확인 할 수 있습니다. 충전 기계는 이 과정을 매일 수천 번 수행합니다. 소비자가 캔을 열 때 쉬익 하는 소리가 들리지 않으면 무언가 이상하다고 생각 할 수 있습니다. 그렇기 때문에 적정한 충전량과 충전 압력을 유지 하는 것은 매우 중요 합니다. AT와 EVT는 캔음료를 검사하는 어플리케이션을 만들었습니다. 24시간 작동하며 초당 40개의 캔(분당 2,400캔), 하루 350만개의 캔을 스캔 할 수 있습니다. AT/EVT 솔루션을 적용하기 전에 음료 제조업체는 one-point 센서(한 점의 높이를 측정)를 사용하여 캔을 검사했지만 원하는 결과를 얻지 못했습니다. One-point 센서가 너무 부정확하여 결국 너무 많은 불량품이 발생했습니다. 당시 EVT는 이미 라벨 위치 검사, 캔의 목 검사 또는 스크래치 검사와 같은 2D 검사를 이 공장에 공급 중인 업체였습니다. 제조업체는 EVT가 3D 솔루션도 제공한다는 사실을 듣고 캔 압력 검사용 어플리케이션을 개발하게 되었습니다. 해결책 이 어플리케이션을 위해서 AT사의 C5-CS 3D센서와 EVT사의 소프트웨어를 사용 하였으며 소프트웨어는 현장의 검사 시스템에 연결된 리눅스 컴퓨터에 설치 되었습니다. 데이터는 GigE 인터페이스를 통해 전송됩니다. 제조업체는 압력을 제어하기 위해서 캔을 운반하는 컨베이어 벨트에 트래커를 장착했습니다. 이 트래커는 캔의 위치를 실시간으로 추적하며 AT의 3D센서인 C5-2040CS23-100에 신호를 전달합니다. AT 3D센서는 캔 상단 면의 높이, 형상을 스캔하여 3D 포인트 클라우드 데이터를 생성합니다. 그런 다음 EVT 소프트웨어는 이 포인트 클라우드 데이터를 사용하여 높이, 형상 값을 확인하고 캔의 압력이 높은지, 낮은지를 검사합니다. 그렇게 3D 포인트 클라우드 데이터를 이용한 캔의 압력 검사 시스템이 완성 되었습니다. 그림 2: EVT 소프트웨어는 포인트 클라우드 데이터를 이용하여 곡률을 확인하고 캔에 과압 또는 저압이 있는지 검사합니다. 먼저 항상 같은 위치에 있는 캔의 테두리를 기준으로 잡고 캔 상단에서 가장 높은 위치에 있는 캔마개의 위치를 가지고 캔 상단 면의 불룩함 정도를 측정 합니다. 캔에는 최소 150μ의 압력이 있어야 하며 100μ 미만이면 압력이 너무 낮으므로 캔을 불량으로 처리해야 합니다. 이 측정에는 허용 오차가 있으며 캔 곡률 값이 이 허용 오차를 벗어나는 즉시 컨베이어 벨트 측면에 부착된 노즐에서 압축 공기로 캔이 배출됩니다. 위 검사가 정상적으로 동작하는지 확인하기 위해 하루에 한 캔은 표면 마감 불량으로 인한 불량 처리가 되는지 확인합니다. AT는 프로파일 당 2,048포인트의 해상도와 초당 25,000 프로파일의 속도 때문에 이 어플리케이션에 C5-2040CS-23-100을 사용하기로 결정했습니다. 센서는 100mm의 X축 FOV를 가지고 있어 센서가 컨베이어 벨트의 캔 위치 변화에도 유연하게 반응할 수 있습니다. 그리고 이 센서는 GenICam 호환 카메라이기 때문에 소프트웨어는 GenICam을 통해 카메라를 제어하고 포인트 클라우드 데이터를 획득한 다음 소프트웨어가 이 포인트 클라우드 데이터를 처리 및 검사합니다. EVT 소프트웨어는 3D 검사 도구가 있는 EYE Vision Standard 소프트웨어로 구성됩니다. 이 어플리케이션에서는 조명 설치 공간 확보부터 시작하여 여러 가지 조명에 관련된 문제를 생각할 필요가 없었습니다. 그 이유는 AT 3D 센서는 카메라와 레이저가 일체형이며 컴팩트 하기 때문 입니다. 그리고 레이저 광을 사용한 프로파일 측정은 매우 견고하며 주변 빛의 간섭이 없기 때문 입니다.
2022.10.31 -
 라인 스캔 카메라와 조명 (Illumination of Linescan Camera)
라인 스캔 카메라와 조명 (Illumination of Linescan Camera)라인 스캔 카메라와 조명 (Illumination of Linescan Camera) 안녕하세요. 화인스텍 마케팅 팀입니다. 화인스텍 블로그를 찾아주셔서 감사합니다. 오늘은 머신비전 조명 중 라인 스캔 카메라와 조명 (Illumination of Linescan Camera)에 대해 포스팅하도록 하겠습니다. 2개 파트로 나눠서 포스팅하겠습니다. 오늘은 라인 스캔 조명의 사용방법이고 두 번째 시간에는 조명의 종류에 대해 포스팅하겠습니다. 라인 스캔 카메라는 조명과 카메라의 셋업에 따라 이미지가 매우 다르게 나타납니다. 아주 좁은 영역을 보는 것이기 때문에 광량의 차이도 매우 큽니다. 아래 몇 가지 예시를 들었는데요 어디까지나 예시일 뿐 실제 자재에서 테스트는 꼭 하셔야 합니다. <그림 1> 라인 스캔 카메라와 조명 (Illumination of Linescan Camera) Type-01 움푹 패어진 곳이나 스크래치 등을 검사할 때 가장 기본적인 구조입니다. 기구적으로 카메라 측에 부착해서 검사 대상의 움직임에 크게 간섭이 없습니다. <그림 2> 라인 스캔 카메라와 조명 (Illumination of Linescan Camera) Type-02 위 세팅은 물체의 반사가 좋을 경우에 미세한 스크래치 혹은 이물까지 검사가 가능한 구조입니다. <그림 3> 라인 스캔 카메라와 조명 (Illumination of Linescan Camera) Type-03 위 경우는 검사체가 반사가 좋을 경우 참고 이미지라고 보시면 됩니다. 정반사되는 평면은 하얗게 이미징 되고 불량 부분은 음영이 지게 됩니다. <그림 4> 라인 스캔 카메라와 조명 (Illumination of Linescan Camera) Type-04 위 경우는 Areascan 조명의 종축 조명처럼 사용하는 것입니다. 표면의 문자나 마크 인식할 때 유용하게 사용합니다. <그림 5> 라인 스캔 카메라와 조명 (Illumination of Linescan Camera) Type-05 위 경우는 (반)투명한 제질 같은 경우 빛이 평면을 통해 들어가서 스크래치 나 이불 부분에서 밝게 빛나게 하는 것입니다. 아크릴 조형물 같은 데서 이것을 이용해 효과를 보기도 하죠^^ <그림 6> 라인 스캔 카메라와 조명 (Illumination of Linescan Camera) Type-06 이 구조는 백라이트 구조이며, 구조상 조명 설치 공간이 협소하여 아랫부분에서 위로 조사가 어려울 경우 뉘어놓은 형태입니다. 일반적으로 라인조명의 내부 구조상 길쭉하기 때문에 이런 것도 검토하시면 좋습니다. 전반사 미러를 통해 백라이트로 사용하며, 빛이 통과하는 자재에 사용 가능하고 문자나 패턴 등의 불량을 볼 때 사용합니다. 어떠신가요? 도움이 되셨나요? 실제 자재로 테스트하면 좋겠지만 이해를 돕기 위해선 그림이 더 나을 것이라 판단되어 위와 같이 표현해 드렸습니다. 머신비전에서 조명을 선택할 때 꼭 명심하셔야 할 사항은 위 내용은 예시일 뿐 실제 자재에서 꼭 테스트하신 뒤에 진행하셔야 합니다. 끝까지 읽어주셔서 감사합니다. 그럼 다음 시간에 또 만나요~
2022.05.12 -
 라인 스캔 카메라(LINESCAN CAMERA)란 무엇인가요?
라인 스캔 카메라(LINESCAN CAMERA)란 무엇인가요?라인 스캔 카메라(LINESCAN CAMERA) 안녕하세요 화인스텍 블로그를 찾아주셔서 감사합니다. 오늘은 머신비전 카메라 중 크게 나눠서 Areascan Camera, Linescan Camera가 있는데 Area Camera는 모두가 접하고 있는 카메라(휴대폰, DSLR, 미러리스 등) 이기 때문에 따로 이야기하지 않겠습니다. 센서 부분만 보시면 될 것 같고요. Linescan Camera(라인스캔카메라)에 대해 알아보도록 하겠습니다. Linescan Camera(라인스캔카메라)는 우리가 흔히 쓰는 스캐너와 같다고 보시면 됩니다. 한 줄로 길게 찍는 거죠 <그림 1 > 라인 스캔 카메라와 영역 스캔 카메라의 구조 Linescan Camera(라인스캔카메라)는 아래 상황에 적합합니다. 1. 시료가 멈추지 않고 지나가야 하는 경우 2. Area Camera로는 커버가 되지 않는 경우 3. 한 방향의 조명에서만 영향을 받는 경우 4. 기타 Area Camera로 어려운 경우 Linescan Camera(라인스캔카메라)는 센서의 종류에 따라 Mono : Single, Dual, Quad, TDI(Time Delay Integration) Color : Bayer, Bilnear, Trilinear, 3-Sensor(3 Chip), 4-Sensor(4 Chip), Quad linear 로 나누어집니다. <그림 2> Mono Sensor의 차이 Mono Linescan Camera의 경우 라인의 수가 많을수록 그 수만큼 오버랩 하여 값을 가져오기 때문에 같은 조명, 같은 속도에서 더 좋은 이미지를 가져올 수 있습니다. HDR의 다중노출 기술과 비슷하다고 생각하면 됩니다. <그림 3> Color Linescan Sensor의 종류 위 이미지는 Color Linescan Camera(컬러 라인 스캔 카메라) 센서의 종류입니다. Linear 방식은 Mono Dual line 과 비슷합니다. RGB 값을 오버랩 합니다. 3-Sensor만 프리즘 방식으로 RBG를 분리하며, NIR이 포함된 4-Sensor 타입도 있습니다. 프리즘 방식의 이미지 퀄리티가 가장 좋습니다. 지금까지 Linescan Camera(라인스캔카메라)에 대해 알아봤습니다. 다음에는 Linescan Camera(라인스캔카메라)와 떨어질 수 없는 엔코더를 알아보도록 하겠습니다.
2022.05.11 -
 카메라 센서의 크기 (Sensor Size)
카메라 센서의 크기 (Sensor Size)카메라 센서의 크기 이번에는 지난번 포스팅에 이어 머신비전 카메라의 센서사이즈(Sensor Size)에 대해 이야기할 텐데요 DSLR 을 전문적으로 사용하시는 분도 계시고 저희 업계 종사하시는 분도 계시겠지만 센서 사이즈는 단순한 계산에 의해 만들어지게 됩니다. 여기서는 DSLR 용 센서는 언급하지 않고 머신비전용으로 대체적으로 많이 사용되는 센서사이즈(Sensor Size) 에 대해 언급하겠습니다. 우선 그림을 보시죠! <그림 1> Sensor Size 위 이미지는 Area Camera Sensor를 단순하게 표현한 그림입니다. 휴대전화로 촬영하든 DSLR로 촬영하든 촬여한 모든 이미지는 확대하면 <그림 1>과 같이 바둑판 형식으로 되어 있습니다. 설명을 위해 일본 Sentech 사의 STC-SB1242POE 모델의 설명서를 한번 보겠습니다. <그림2> 참고 사양서 (출처: www.sentech.co.jp) Active Picture Elements.. 해상도를 어렵게 써놨네요. Cell Size = 그림에서 Pixel Size와 같은 이야기입니다. 센서 사이즈(H) = 해상도(H) × 셀 사이즈(H) 센서 사이즈(V) = 해상도(V) × 셀 사이즈(V) 가로는 가로끼리 세로는 세로끼리 끼리끼리 곱하시면 됩니다. 결과값은 가로(H) : 7,400um => 7.4mm 세로(V) : 5,550um => 5.55mm 센서사이즈(Sensor Size) 계산법 참 쉽죠? 아래 그림은 머신비전에서 일반적으로 사용되는 Area Sensor의 가로, 세로, 대각선 사이즈입니다. 아래 표는 일반적인 C-mount에서 사용할 수 있는 사이즈로 카메라 제조사마다 조금씩 차이가 있습니다. 참고용으로 알고 계시면 좋을 것 같습니다. <그림 3> Area Sensor Size 여기서 잠깐! 1"(인치) 는 일반적으로 25.4mm 인데 센서에선 기준이 다르네요? "카메라 센서에서 인치사이즈는 1950년대 진공관으로 카메라 센서가 만들어지던 시절 센서를 보관하는 케이스이 사이즈에서 사직되었는데 아직도 그 기준으로 표기되어 집니다." 어디선가 들은 이야기 그래서 표기되는 인치보다 센서의 대각선이 더 짧습니다. 불편하게시리 그리고 명확히 설명을 해주는 곳도 없죠 그냥 그러려니 하고 넘어가는 것이 좋습니다. 센서사이즈(Sensor Size), 실제 대각선 길이 공식은 쉽지만 귀찮죠 그래서 엑셀을 준비해 놓았습니다. 첨부파일을 통해 잘 활용하세요!! 그럼 이야기 한 김에 Line Sensor Size를 겉햝기 식으로 알아보겠습니다. 라인스캔 카메라는 스캐너라고 보시면 됩니다. 해상도를 이야기 할 때도 조금 다른데요. 영역 스캔 카메라는 5메가, 12메가, 16메가 이렇게 부르지만 라인 스캔 카메라는 2K, 4K, 12K, 16K 이렇게 부르죠 1K = 1,024px로 앞에 숫자를 곱하시면 센서 총 픽셀개수가 됩니다. 세로는 스캐너라고 말씀드렸듯 1line~4line 이 일반적이고 세로가 긴 것은 256line (TDI Sensor)까지도 있습니다. Roll to Roll 처럼 흐르는 물체를 멈추지 않고 촬영할 때 많이 쓰입니다. <그림 4> Line Sensor Size 계산법은 동일합니다. 가로는 가로끼리, 세로는 세로끼리 곱하시면 되고 센서 길이에 맞게 렌즈를 선정하시면 되겠습니다. 라인 스캔 카메라는 나중에 더 자세히 다루기로 하고 이번 포스팅은 마치겠습니다.
2022.03.17




