

총 5 건
-
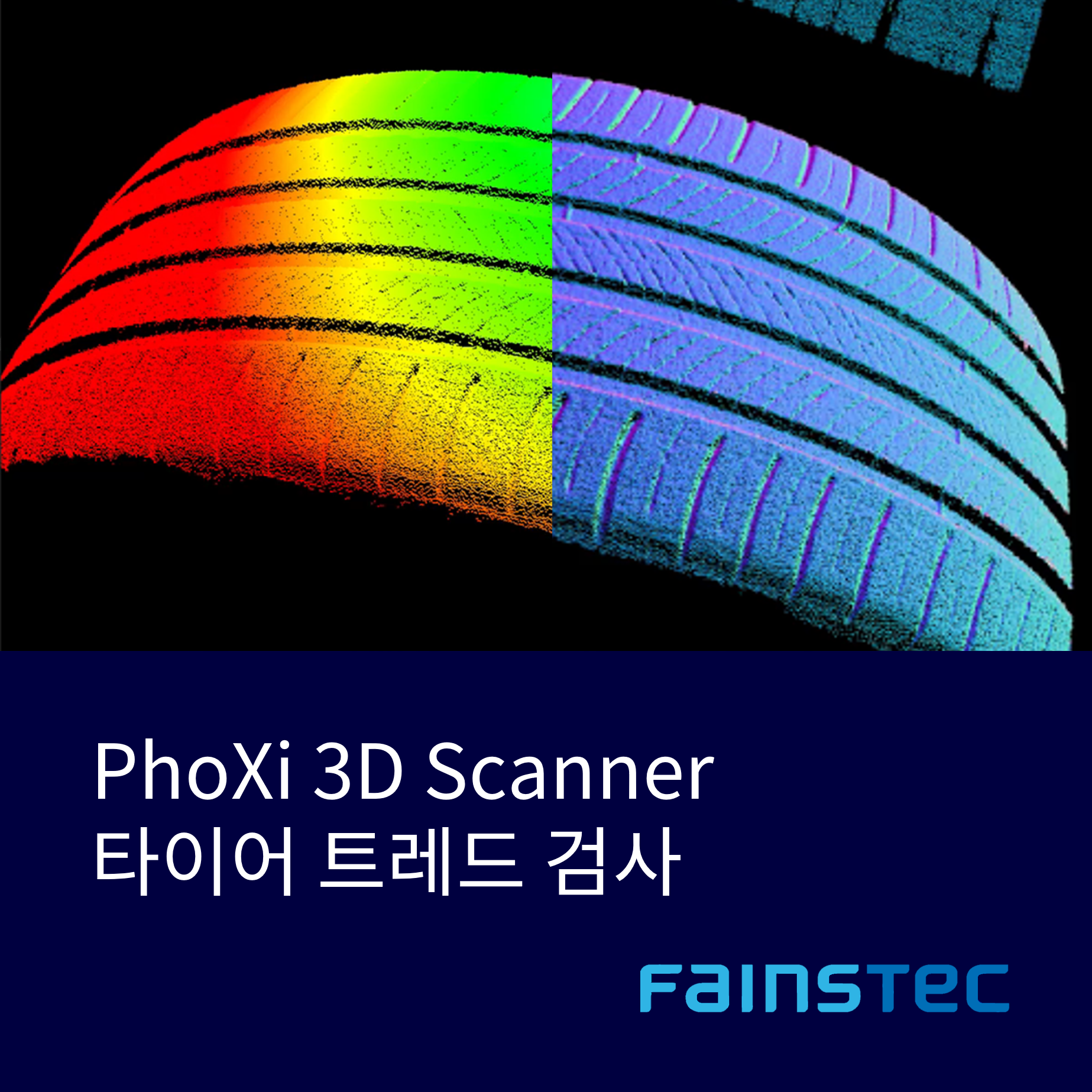 [화인스텍] 포토네오(Photoneo) PhoXi 3D 산업용 스캐너로 타이어 트레드 검사
[화인스텍] 포토네오(Photoneo) PhoXi 3D 산업용 스캐너로 타이어 트레드 검사타이어는 차량의 안전성과 성능에서 핵심적인 역할을 하며, 제조 과정에서의 품질 관리가 필수적입니다. 이 과정에서 산업용 3D 스캐닝 기술은 일관된 기준으로 타이어를 검사하여 결과의 신뢰성을 높이고 체계적인 품질 관리를 지원합니다. 3D 카메라를 통한 타이어 생산 공정에서의 검사는 정밀한 품질 관리, 불량 제품 식별, 생산 효율성 향상, 그리고 제조 표준 규격 준수에 필수적입니다. 특히, Photoneo의 PhoXi 3D Scanner는 타이어의 외관 검사, 내부 구조 검사, 균형 검사, 트레드 균일성 검사, 제조 공정 모니터링에서 뛰어난 성능을 발휘합니다. <머신비전 솔루션을 활용한 타이어 외관검사 어플리케이션> 이러한 타이어 검사의 높은 정밀성과 효율성을 구현하기 위해, 산업용 3D 스캐너가 제조 공정에서 필수적인 도구로 자리 잡고 있습니다. 화인스텍의 공식 파트너사 포토네오(Photoneo)의 PhoXi 3D 스캐너의 고해상도 3D 데이터 캡처와 빠른 스캔 속도는 타이어의 결함과 상태를 정밀하게 측정하고 분석하며, 다양한 환경에서도 안정적인 성능을 발휘하는 견고한 설계를 갖추고 있습니다. <타이어 외관 검사에 적합한 산업용 3D 스캐너_PhoXi 3D Scanner> 이러한 기술적 장점 덕분에 다양한 머신비전 기반 타이어 검사 기능이 효과적으로 구현될 수 있습니다. PhoXi 3D 스캐너는 3백만 개의 3D 포인트로 구성된 고해상도 데이터를 제공하며, 실시간으로 움직이는 물체를 정확하게 스캔하는 뛰어난 기능을 갖추고 있습니다. PhoXi 3D 스캐너를 실제 어플리케이션인 타이어 검사에 적용해 보았습니다. 다양한 타이어 검사 중 타이어 트레드의 깊이와 폭을 검사하였으며, 고정된 위치에서의 깊이 및 폭 측정에 집중해 보았습니다. * PhoXi 3D Scanner가 위에서 타이어를 스캔하는 모습 Photoneo 프로그램으로 확인할 수 있는 데이터 다양한 컬러 표현을 지원하는 Photoneo 프로그램을 사용하여, 스캔 된 데이터를 시각적으로 확인할 수 있습니다. Photoneo 프로그램은 파라미터 설정, 이미지 확인 및 저장 기능을 제공하여, 스캔 된 3D 데이터를 효과적으로 다룰 수 있도록 합니다. PhoXi 3D 스캐너로 캡처한 타이어의 3D 모델을 시각적으로 분석한 결과를 볼 수 있습니다. 화면에서 스캔 된 타이어의 트레드 깊이와 폭 측정을 통해 타이어의 세부 상태를 확인할 수 있습니다. 또한, 3D 스캔을 통해 얻은 데이터를 처리하여 포인트 클라우드를 생성하고 이를 바탕으로 3D 모델링을 수행한 결과를 확인할 수 있습니다. 아래 사진을 클릭해보세요! ↓↓↓↓↓↓↓↓↓ Phoxi 3D Scanner L size SPECIFICATIONS Photoneo PhoXi technical parameters PhoXi 3D 스캐너는 실시간으로 움직이는 물체를 정확히 스캔할 수 있는 기능 덕분에, 타이어 제조와 검사뿐만 아니라 아래와 같은 다양한 어플리케이션에 적용될 수 있습니다. *사진을 클릭하여 3D 모델링 결과를 확인해 보세요! 가장 작은 부품 검사 PhoXi 3D 스캐너 XS는 161~205mm의 스캔 범위 내에서 작은 물체를 높은 정밀도로 스캔할 수 있도록 설계되었습니다. 높은 정확도와 세부 수준을 제공하는 XS 모델은 물체와 재질 검사에 가장 적합한 선택입니다. 큰 물체 검사 PhoXi 3D 스캐너 XL은 1680~3780mm의 스캔 범위 내에서 매우 큰 물체를 스캔하는 데 적합합니다. 광택, 반사 또는 검정색 표면이 겹쳐져 있는 다양한 상자 종류가 적재된 화물의 디팔렛타이징과 같은 여러 응용 분야에서 사용할 수 있습니다. 정확한 유기물 인식 PhoXi 3D 스캐너는 식품 업계에서 과일, 야채 또는 생선과 같은 유기물 물체를 스캔할 때 사용할 수 있습니다. 가장 복잡한 물체도 척척 노이즈 필터링에 대한 고급 알고리즘 덕분에 PhoXi 3D 스캐너는 반짝이거나 반사되는 재질에서도 (톱니바퀴와 같은 금속 물체) 스캔하고 검사할 수 있습니다. 메디컬 케어 PhoXi 3D 스캐너는 인체 스캔과 같은 의료 산업에도 적용가능한 어플리케이션입니다. 상이한 표면 스캔을 한번에 PhoXi 3D 스캐너는 표면이 서로 다른 다양한 종류의 물체가 있는 복잡한 장면도 스캔 한 번으로 포인트 클라우드를 확보할 수 있습니다. PhoXi 3D 스캐너에 대해 더 자세히 알고 싶거나, 제품 구매 및 상담을 원하신다면, 화인스텍을 방문해 주시기 바랍니다.
2024.08.07 -
 Bin Picking Studio - 다양한 용도로 활용할 수 있는 로봇 지능 소프트웨어
Bin Picking Studio - 다양한 용도로 활용할 수 있는 로봇 지능 소프트웨어Bin Picking Studio 가장 다양한 용도로 활용할 수 있는 로봇 지능 소프트웨어 ㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡ 작동방식 ㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡ 로봇 선택 포토네오는 다양한 회사의 프로젝트를 위해 지속적으로 로봇 데이터베이스를 개발했습니다. 이를 통해 포토네오는 다양한 브랜드에서 많은 수의 로봇 모델을 지원해왔으며 목록에 원하는 로봇이 없는 경우에도 소통을 통하여 문제를 해결해왔습니다. 이로인해 다양한 로봇이 Bin Picking Studio에 통합되어 활용되었습니다. 그리퍼 업로드 그리핑 도구의 CAD 모델을 업로드하며 그리퍼 모델이 가상 환경에서 도구 포인트 구성에 사용됩니다. 개체 업로드 Bin Picking 그리핑 포인트 계획을 시작할 때는 선택하려는 제품의 CAD 모델만 있으면 됩니다. Bin Picking Studio에 업로드하면 가상 환경에서 즉시 작업을 시작할 수 있습니다 Set up gripping & tool points Bin Picking 설정은 그리퍼가 물체를 잡는 위치와 방법을 선택하는 것으로 시작됩니다. 간단한 시각적 공정 덕분에 복잡한 수학이 필요하지 않으며 Bin Picking Studio는 이 작업을 원활하게 지원합니다. 환경 로드 환경로드 단계에서는 Bin Picking Studio에 피킹이 이루어지는 위치를 알려줍니다. 피킹 셀의 CAD 모델을 로드하여 가능한 가장 쉬운 방법으로 작업을 다시 수행합니다. 업로드 직후 Studio는 작업에 사용할 수 있는 3D 시각화 정보를 제공합니다. 품 위치 파악 설정 Bin Picking Studio는 부품 위치를 파악하는 알고리즘을 셋팅하기 위한 내장 엔진이 구현 되어있습니다. CAD 매칭 방식을 기반으로 한 이 알고리즘은 빠른 속도와 견고성에 중점을 둔 빈 피킹에 적합하도록 개발되었습니다. 카메라에 대한 로봇 보정 Photoneo의 Bin Picking Studio는 특별하게 준비해야 하는 보정 시트가 필요하지 않습니다. 구 모양의 원형 물체 하나로 가시적인 안내 프로그램에 따라 스캐너와 로봇을 보정하고 동기화합니다. 이로 인해 보정 전체에 걸쳐 검증하고 평가할 수 있는 시각적 피드백을 즉시 받습니다. 대화형 디버깅 마지막으로 가상 환경 내에서의 최첨단 디버깅 툴을 활용하세요. 이를 통해 솔루션이 얼마나 잘 준비되었는지 확인할 수 있습니다. 20분 만에 로봇 지능 설정 피킹 프로젝트를 위한 완벽한 솔루션 Bin Picking Studio는 PhoXi 스캐너라인으로 대표되는 강력한 3D 비전 하드웨어와 피킹의 셋팅을 위한 통합 소프트웨어의의 결합입니다. 4개의 공급업체에서 찾아야 할 것을 우리는 올인원 피킹 솔루션으로 하나의 패키지로 제공합니다. Bin Picking Studio 이점
2024.05.31 -
 포토네오 산업용 고해상도 3D 스캐너 Photoneo PhoXi 3D
포토네오 산업용 고해상도 3D 스캐너 Photoneo PhoXi 3DPhotoneo의 PhoXi 3D 스캐너는 고해상도에 정확도가 매우 높은 정지 장면 스캐닝이 필요할 때 사용하는 스캐너입니다. PhoXi 3D 구조화된 광선 투사 접근 방식은 원하는 부분을 신속하고 정확하게 포인트 클라우드 형태의 출력으로 제공합니다. 견고한 스캐너는 고해상도 스캔 품질을 보장하므로 열악한 환경에서 최고의 스캐너 역할을 수행합니다. PhoXi 3D 스캐너는 최고의 해상도/속도 비율 덕분에 Vision Systems Design Innovators Awards Program에서 상을 받았습니다. The-Next-Generation-of-PhoXi-3D-Scanner-is-here ? 까다로운 머신 비전 작업에 적합한 산업용 3D 스캐너 Photoneo Phoxi Photoneo PhoXi 3D 스캐너 적용 가능한 어플리케이션 PhoXi 제품군의 각 스캐너(XS-XL 모델)는 스캔된 물체의 크기, 스캔 볼륨 및 기타 측면에 따라 다양한 응용 분야에 적합합니다. 아래 어플레케이션 3D 모델링을 통해 PhoXi를 직접 체험해보세요! 가장 작은 부품 검사 PhoXi 3D 스캐너 XS는 161~205mm의 스캔 범위 내에서 작은 물체를 높은 정밀도로 스캔할 수 있도록 설계되었습니다. 높은 정확도와 세부 수준을 제공하는 XS 모델은 물체와 재질 검사에 가장 적합한 선택입니다. 큰 물체 검사 PhoXi 3D 스캐너 XL은 1680~3780mm의 스캔 범위 내에서 매우 큰 물체를 스캔하는 데 적합합니다. 광택, 반사 또는 검정색 표면이 겹쳐져 있는 다양한 상자 종류가 적재된 화물 운반대 하역과 같은 여러 응용 분야에서 사용할 수 있습니다. 정확한 유기물 인식 PhoXi 3D 스캐너는 식품 업계에서 과일, 야채 또는 생선과 같은 “살아있는” 물체를 스캔할 때 사용할 수 있습니다. Photoneo AI 기반 솔루션 AnyPick은 변형되는 표면, 다양한 모양 및 상이한 크기의 물체를 인식할 수 있습니다. 가장 복잡한 물체도 인식 노이즈 필터링에 대한 고급 알고리즘 덕분에 PhoXi 3D 스캐너는 반짝이거나 반사되는 재질에서도 (톱니바퀴와 같은 금속 물체) 스캔하고 검사할 수 있습니다. 의료 산업 PhoXi 3D 스캐너는 인체 스캔과 같은 의료 산업에도 적용가능한 어플리케이션입니다. 상이한 표면을 한번에 스캔 PhoXi 3D 스캐너는 표면이 서로 다른 다양한 종류의 물체가 있는 복잡한 장면도 스캔 한 번으로 모든 포인트 클라우드를 확보할 수 있습니다. SPECIFICATIONS Photoneo PhoXi technical parameters Photoneo의 PhoXi 3D에 관한 기술 사양이 궁금하시다면 화인스텍 홈페이지를 통해 알아보세요!
2024.05.22 -
 포토네오(Photoneo) 산업용 실시간 3D 비전 카메라 MotionCam 3D스캐너
포토네오(Photoneo) 산업용 실시간 3D 비전 카메라 MotionCam 3D스캐너포토네오(Photoneo)는 로보틱스 비전 분야에서 특허 받은 3D 기술을 바탕으로 다양한 해상도와 높은 품질 및 해상도를 갖춘 3D 카메라를 개발 및 제공하는 회사입니다. Photoneo MotionCam 3D 포토네오의 MotionCam 3D 스캐너는 설치가 간편하지만 성능은 강력한 산업용 실시간 3D 카메라입니다. MotionCam 3D 스캐너는 포토네오사가 보유한 Parallel Structured Light 특허 기술을 통해 물체가 움직이는 여러 동적 환경에 대해 물체의 고해상도 3D 스캐닝이 가능한 카메라입니다. Parallel Structured Light Technology Parallel Structured Light 기술은 구조광 스캐닝의 최고의 품질과 해상도를 매우 역동적인 환경에서 실시간 3D 이미징 구현을 가능하게 하는 기술입니다 기본적인 3D 이미지 센서는 순차적 스캐닝 방법으로는 움직이는 물체를 높은 품질과 해상도로 표현할 수 없지만, 고유의 모자이크 픽셀 패턴 방식이 적용된 이 기술은 근본적으로 각 픽셀 또는 그룹 단위 픽셀로 외부에서 받아오는 신호에 따라 독립적으로 변조될 수 있기 때문에 움직이는 이미지를 포착할 수 있는 방법을 구현해 냅니다 실제 Parallel Structured Light 기술이 다른 스캐닝 기술과 어떠한 독보적 차이가 있는지 아래 스캐닝 된 실제 실시간 스캔 데이터 영상들을 통해 한 번에 확인이 가능합니다. 확실히 더 선명하고 끊김 없는 데이터 확보를 하는 것을 볼 수 있습니다. Photoneo MotionCam 3D의 기능적 특징 --- 진동 억제 기능을 통한 왜곡이나 깨짐 없는 스캔 가능 산업 현장에 특화된 IP 65 등급, POE(Power-over-Ethernet) 특허 받은 병렬 구조광 방식으로 움직이는 물체의 3D 데이터 획득 가능 최대 40m/s로 이동하는 물체를 10us의 픽셀 당 노출 시간으로 스캔 가능 Plug & Play 지원과 직관적인 API를 통한 손 쉬운 설치 및 사용 2 Mega 의 높은 해상도를 통한 정밀하고 Blur 없는 데이터 제공 매 스캔 시 1.5M 개의 3D 포인트 데이터 획득 가능 최소 36cm에서 최대 3m 까지의 넓은 스캐닝 영역 또한, 포토네오의 MotionCam 3D 스캐너는 사용자의 선호에 따라 Color, Normals, Depthmap 등 다양한 Output 데이터 제공이 가능합니다. Photoneo의 MotionCam 3D 스캐너는 탁월한 성능만큼, 움직이는 물체에 대한 감지 및 실시간 측정 길이 3M 이상의 물체에 대한 검사 스캐닝 및 3D모델 생성 실시간으로 움직이는 생상 및 조립 라인에서의 안정적인 스캐닝 등, 다양한 산업 분야에서 활용되고 있습니다. Dimensioning & measurement Overhead conveyors Hand Eye object manipulation Picking of moving objects Scanning of large objects 3D model creation of large objects Moving objects inspection Assembly in motion Photoneo MotionCam 3D Specification Sheet
2023.09.13 -
 Photoneo - 간단한 3D 피킹(picking) 어플리케이션을 위한 새로운 방법
Photoneo - 간단한 3D 피킹(picking) 어플리케이션을 위한 새로운 방법Locator Studio - 간단한 3D 피킹(Picking) 어플리케이션을 위한 새로운 방법 평평한 바닥 위의 움직이는 물체를 집는 정도의 간단한 작업을 자동화하고 싶으신가요? 이정도 난이도의 작업을 위한 것이라면 세밀한 경로설정 및 알고리즘까지 갖춘 bin picking solution까지 필요하지 않습니다. 로봇 주위에 높은 벽이나 이동 시 충돌위험 없는 평평한 표면 위에서 물체를 집는 것이라면 최신 3D비젼을 적용한 간단한 솔루션 만으로도 해결할 수 있습니다. 이렇게 간단한 솔루션을 적용하면 더 빠르게 작업할 수 있고, 보정과 설정도 쉬워지고 기능을 단순화 할 수 있는 등의 장점이 있습니다. 자동화된 bin picking은 관련된 복잡성 때문에 매우 어려운 기술적 과제로 여겨집니다. "눈 앞의 성배" (Holy Grail in sight)라고 불리기도 하죠. 우리는 여러분이 가장 까다로워하는 bin picking 어플리케이션을 완벽히 숙달할 수 있도록 심혈을 기울여 강력한 로봇지능 솔루션을 개발했습니다. 바로 Bin Picking Studio 입니다. 그러나 매번 bin picking solution처럼 정교하고 복잡한 솔루션이 필요한 것은 아닙니다. 때론 기초적이고 간단한 시스템만으로도 충분히 해결할 수 있는 어플리케이션이 있죠. 높은 난이도의 bin picking 어플리케이션을 위한 복잡한 솔루션은 꽤 많지만, 오히려 빠르게 물체 위치를 파악하고 충돌 없는 피킹(picking)을 위한 간단한 시스템은 없었습니다. 이 때문에 Photoneo는 간단한 어플리케이션을 위한 3D picking 도구인 Locator Studio를 개발했습니다. 이 새로운 Locator Studio는 기존의 검증된 기술적 원리를 토대로 작동하지만 단순성은 기존 bin picking solution보다 빠른 속도, 손쉬운 보정과 구성 및 작동, 특별한 기술이 없어도 손쉽게 사용할 수 있는 등의 많은 이점을 제공합니다. Locator Studio의 주요 장점을 요약하면 다음과 같습니다. * 충돌 없는 환경에서 매우 빠르고 간단한 3D 피킹(picking) * 물체 바로 위 혹은 로봇 팔에 부착된 Phoxi 3D 스캐너나 MotionsCam-3D를 통한 빠른 스캐닝 속도와 우수한 품질의 3D 포인트 클라우드 제공 * 웹을 통한 간편한 캘리브레이션과 설정 * 이전 물체를 picking하는 동안 다음 물체를 단 한 번의 스캔으로 CAD기반의 강력한 위치 데이터 제공 * TCP/IP를 통한 대부분의 모든 로봇 시스템과의 빠른 통합 고성능의 Bin Picking Studio와 간단한 Locator Studio와의 차이점을 더 잘 이해하고 싶다면 아래의 표를 참고하세요. Applications - Locator Studio를 사용할 조건과 환경 Locator Studio는 충돌 없는 환경에서 특정방향으로 이동하는 물체를 집어야 하는 모든 상황에서 사용할 수 있도록 기존 2D나 2.5D application을 업그레이드 합니다. 충돌 없는 환경이란 쟁반, 에어캡, 얕은 통, 정지 및 이동하는 컨베이어 벨트나 랙과 같이 충돌 위험이 없는 평평한 표면을 말합니다. Picking 외 지원하는 application으로는 조립이나 나사 고정, 정밀한 부품의 배치를 위한 delayering, destacking, deracking 또는 부품의 위치 확인 등이 있습니다. Locator Studio는 Phoxi 3D 스캐너 및 MotionCam-3D와 함께 사용할 수 있습니다. 또한 사용자 선호도와 application 상황에 맞게 직접 비전장비를 보정할 수 있습니다. 시스템이 picking하는 방향이나 벡터를 정의할 수 있는 기능이 기본제공되어 추가작업 없이도 원하는 순서나 방향대로 부품을 선택할 수 있다는 점 또한 큰 장점입니다. 기술 호환성 Locator Studio는 TCP/IP 프로토콜을 통해 모든 장치와 통신하므로 이더넷만 있으면 사용할 수 있습니다. 개방된 프로토콜이 철저하게 문서화되어 있기 때문에 모든 로봇 브랜드나 산업용 조작기와 통합할 수 있으며, 이를 통해 Locator Studio는 진정한 만능 스튜디오가 됩니다. TCP/IP 인터페이스는 임의의 컨트롤러나 사용자 설정이 되어있는 PC 또는 PLC와 같은 중간 장비를 통해 비전 컨트롤러와 로봇 컨트롤러를 연결해줍니다. 이것은 새로운 기능입니다. 이전 방식은 스캐너를 비전 컨트롤러와 연결하고 비전 컨트롤러를 로봇 컨트롤러에 연결하는 것이었습니다. Bin Picking Studio가 6축 로봇만 지원하는 데 반해 Locator Studio는 호환성에 제한이 없습니다. Locator Studio는 더 유연하고 보편적인 SCARA, DELTA 또는 팔레트 로봇과 같이 높은 자유도를 가진 고관절 로봇이나 7축 시스템에서 사용할 수 있습니다. 작동 방식 Bin Picking Studio와 마찬가지로 Locator Studio도 두 가지 방법으로 보정(Calibration)할 수 있습니다: 1) 일반적으로 통(bin)위에 있는 로봇 셀의 고정된 위치에 스캐너를 장작하는 외부 보정방식 2) 로봇 팔(arm)에 스캐너를 직접 장착한 상태에서 사용자의 손과 눈으로 보정하는 방식 외부 보정 시 사전에 측정된 크기의 볼을 로봇 팔(arm)의 끝점 또는 그리퍼(gripper)에 부착하여 사용합니다. 손과 눈으로 보정하는 것은 패턴이 있는 보정 보드를 사용합니다. 보정 프로세스는 로봇이 특정 자세를 취한 상태에서 스캐너가 보정 볼이나 보드를 볼 수 있는 여러 지점을 추가하는 것으로 구성됩니다. 사용자는 Locator Studio의 웹 GUI를 통해 보정 지점을 추가할 수 있습니다. 또한 각 자세마다 로봇의 TCP정보를 제공해야 합니다. 반자동 보정을 선택하면 TCP정보도 제공하는 전용 로봇 호출을 통해 로봇이 직접 포인트를 추가합니다. 필요한 만큼의 포인트를 추가한 후 보정 정확도와 매트릭스가 계산되어 비전시스템에 저장됩니다. 이렇게 보정에 성공하면 물체를 피킹(picking)할 준비를 마칩니다. 로봇이 물체의 위치정보를 요청하는 것으로 프로세스가 시작하는데, 이 요청에 따라 비전시스템은 스캔을 수행하며 스캔은 Vision Controller에서 직접 포인트 클라우드로 처리됩니다. 이후 실시간으로 CAD데이터로 변환되어 각 물체의 위치는 X,Y,Z좌표의 형태로 이더넷을 통해 전송됩니다. 스마트 메모리기능과 다양한 형태의 그리퍼(gripper)덕분에 시스템은 여러 모양의 부품의 위치를 확인하고 동시에 피킹(picking)할 수 있게 되었습니다. 이 기능은 기존의 bin picking solution에서는 찾을 수 없던 것입니다. Locator Studio 1.0.0버전은 주로 vacuum이나 magnetic gripper를 고려하여 디자인되었기 때문에 충돌회피 기능을 제공하지 않으므로 기계적으로 gripper와 부품의 충돌을 방지할 수 없습니다. 또한 Locator Studio는 기존의 전통적인 picking 기술로 작동되는데, 이는 새로운 프로그래밍 언어를 배울 필요가 없다는 것을 의미합니다. 하지만 많은 프로세스가 로봇 쪽에서 실행된다는 점에서 사용자가 로봇 프로그래밍에 대한 지식이 있다면 활용면에서 시너지 효과는 매우 클 것입니다.
2023.09.06




