EURESYS_Library Open eVision 3D 소개
2022-10-26
1. 소개
Easy3D : Depth Map, Point Cloud, ZMap 그리고 뷰어 사용을 위한 기초 라이브러리
Easy3DLaserLine : Laser Line 추출을 위한 라이브러리
Easy3DObject : 3D Object를 사용하기 위한 라이브러리
Easy3DMatch : 3D Align 및 Match, Point Cloud Merger를 사용하기 위한 라이브러리

Easy3D Studio
무료로 사용 가능한 3D Studio
Laser Line 추출, Depth Map / Point Cloud / ZMap 생성 가능.

2. Easy3D
포인트 클라우드 처리 및 관리
Cropping, Decimating, Fitting and Aligning 을 위한 3D 처리 가능
많은 3D 센서와 호환 가능 (AT,LMI,Chromasens 등)
3D 뷰어와 상호작용하는 3D 디스플레이

Workflow
Depth Map / Point Cloud / ZMap 지원
Calibrartion 및 3D Viewer 제공

3. Easy3D LaserLine
단일 및 이중 레이저 라인 추출 - To Depth Map
레이저 삼각 측량 설정을 위한 편리하고 강력한 3D 보정
Coaxlink Quad 3D-LLE 프레임 그래버와 호환 가능
카메라 센서에 의해 캡처된 일련의 프로파일 이미지가 필요
Laser Line Extraction(LLE) 알고리즘에 의해 Depth Map 추출.

Maximum Detection
모든 열에 존재하는 모든 픽셀을 분석하여 최대 감도의 픽셀을 결정
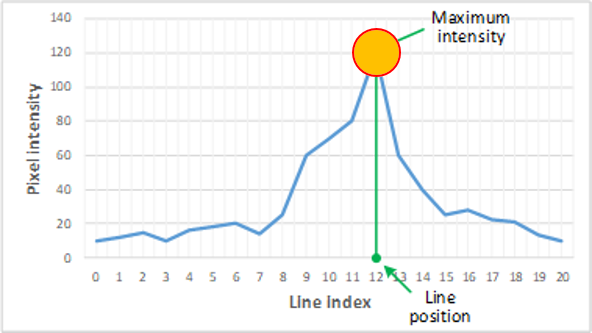
Sub-Pixel 이 제공되지 않음
Peak Detection
Intensity Profile 이 아래 공식에 의해 계산되어 Peak 픽셀을 결정

Sub-Pixel 25, 28 제공
Center of Gravity
무게 중심이 아래 공식에 의해 계산되어 중심 픽셀을 결정
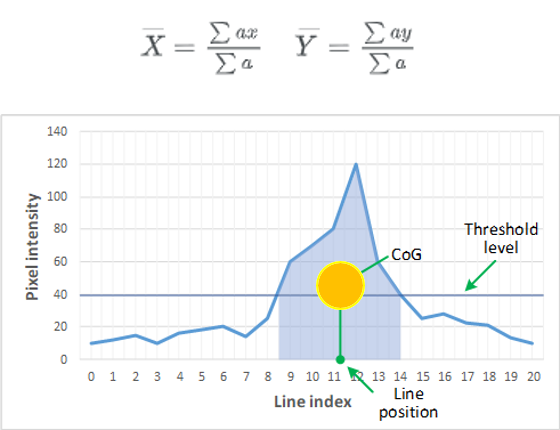
Sub-Piexl 25, 28 제공
Low-pass Linear Filter
노이즈 및 고주파 성분을 제거하기 위한 Linear Filter 를 선택적으로 사용 가능

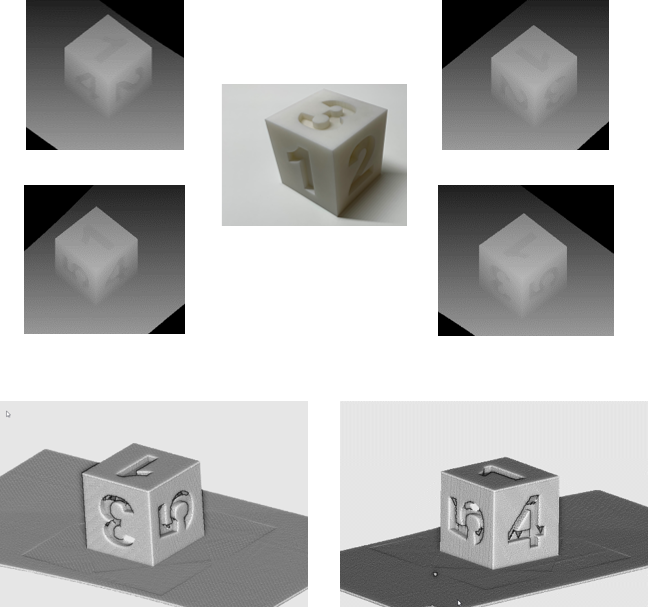
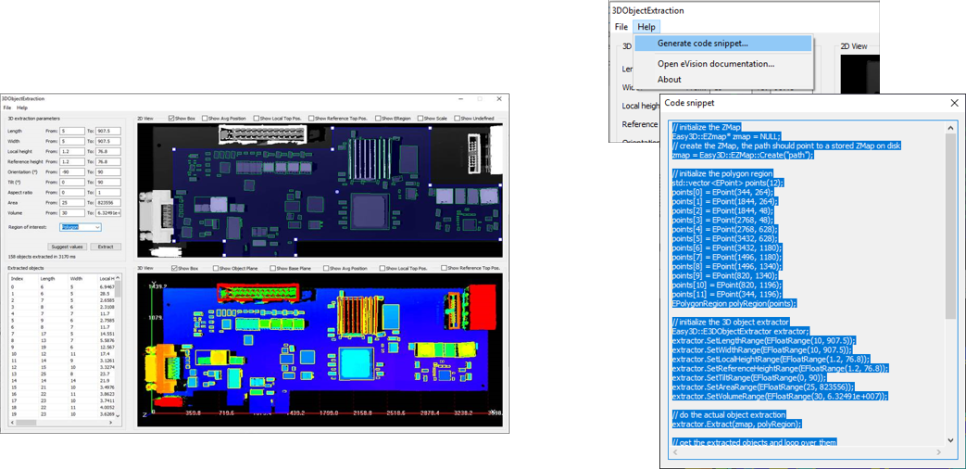
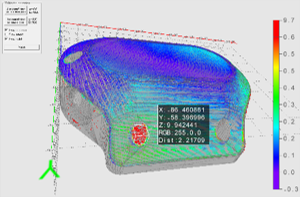
4. Easy3DObject
ZMap, Point Cloud, Image 로부터 Object 추출
ERegion 으로 추출 영역 설정
Sample code / program 제공으로 쉽게 사용
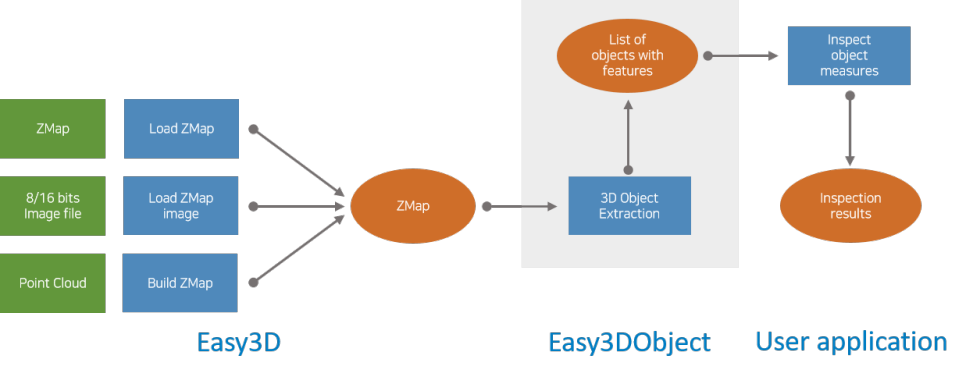
Workflow
결함이 없는 CAD 또는 스캔 된 데이터를 레퍼런스로 등록
스캔 된 데이터와 레퍼런스와 비교

Length and Width
Length : ZMap 공간의 XY평면에서 가장 큰 치수
Width : ZMap 공간의 XY평면에서 가장 작은 치수


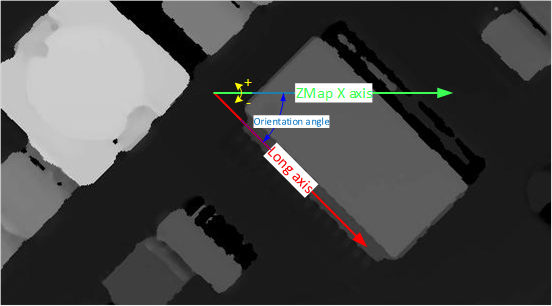
Orientation angle
EZMap의 X축과 Object 사이의 가장 긴 축(길이) 사이의 각도
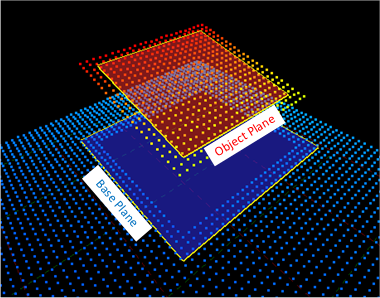
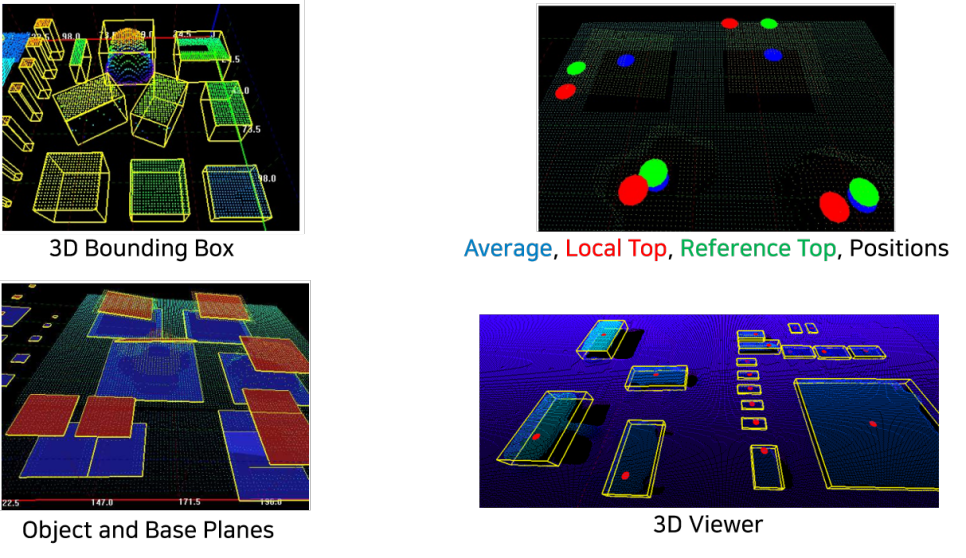
Object Plane and base plane
Base Plane : 검출 된 Object의 높이를 측정하기 위해 기준이 되는 평면
Object Plane : 검출 된 Object의 평면
Local and reference Top Positions and heights
Local top position : Base 평면 기준 가장 높은 지점
Local height : Base 평면 기준 Local top position 의 높이
Reference top position : Reference 평면 기준 가장 높은 지점
Reference height : Reference 평면 기준 Reference top position 의 높이

Local and reference tilt angles
Local tilt angle : Base 평면과 Object 평면 사이의 각도
Reference tilt angle : Object 평면과 ZMap XY 평면 사이의 각도

Average Position
Object의 3D 위치에 대한 산술 평균이며, 무게 중심을 의미
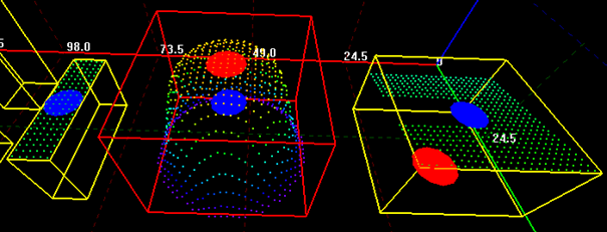
Bounding Box
모든 Object 위치에 대한 최소 거리로 둘러싸인 사각형을 의미

Aspect ratio
Aspect ratio : width 를 Length 로 나눈 값. 비율을 의미

Area
ZMap의 Reference 평면에 투영 된 Object 상단표면의 픽셀 개수

Volume
Object의 Base 평면과 상단 평면 사이의 부피

Using ERegion
ERegion 기능을 사용하여 ZMap의 특정 영역을 추출하거나 무시 가능

Drawing Option
2D 또는 3D Drawing 기능 제공

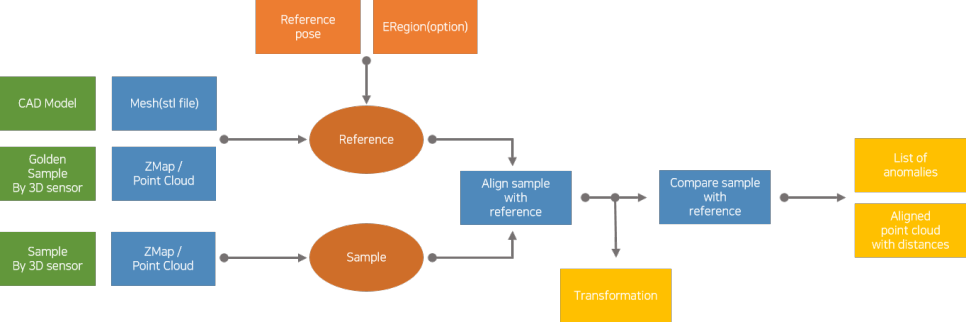
5. Easy3DMatch
레퍼런스 데이터 기준으로 스캔 된 데이터를 정렬 (E3DAligner)

스캔 된 데이터를 레퍼런스 데이터와 비교하여 Local distance 계산 (E3DComparer)
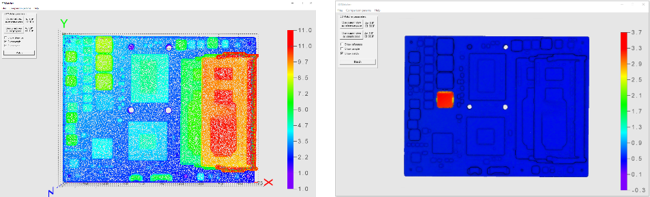
Misplaced features, geometric distortions, gaps, bumps …감지(E3DMatcher)
Workflow
결함이 없는 CAD 또는 스캔 된 데이터를 레퍼런스로 등록
스캔 된 데이터와 레퍼런스와 비교
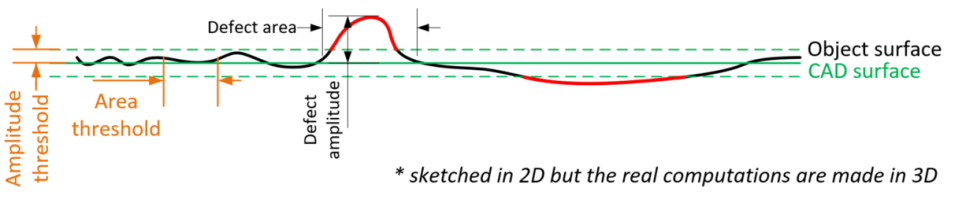
How to detect?
레퍼런스와 스캔 된 데이터의 거리를 계산
Amplitude / Area threshold 를 초과하는 포인트 감지
EPointCloudMerger
여러 위치에 배치 된 여러 3D 센서를 사용
중복 포인트가 제거되고 병합 된 최적화 된 포인트 클라우드 생성