머신비전 3D 검사 기본 용어
2022-05-17
3D 기본 교육 - 기본 용어 정리
안녕하세요 화인스텍 마케팅 팀입니다.
화인스텍 블로그를 찾아주셔서 감사합니다.
오늘은 머신비전 3D 검사 기본 용어에 대해 포스팅하겠습니다.
1. 데카르트 좌표
머신비전 3D 검사를 볼 때 가장 기본인 좌표입니다.
데카르트 3D 좌표계라고 하는데
이름은 어렵지만 아래 이미지와 같이 AutoCad 는 물론 3D Tool에서 항상 보던 그 녀석입니다.
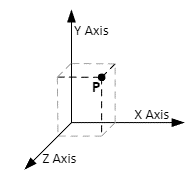
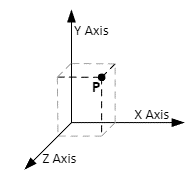
<사진 1> 데카르트 좌표
X, Y, Z 축의 하나의 점으로 표현하여 위치를 나타냅니다.
2. Depth Map(Height Map, Range Map, 깊이 맵)
이미지의 각 픽셀에 세 번째 좌표가 Gray value로 표현된 2D 이미지입니다.
픽셀 값은 물리적 높이 값이 아닌, 광 삼각 측량의 레이저 라인 프로파일의 변위를 나타내고
Calibration 단계를 거쳐 Point Cloud, ZMap으로 변환하는데 사용됩니다.
Depth Map은 아래와 같은 이미지입니다.
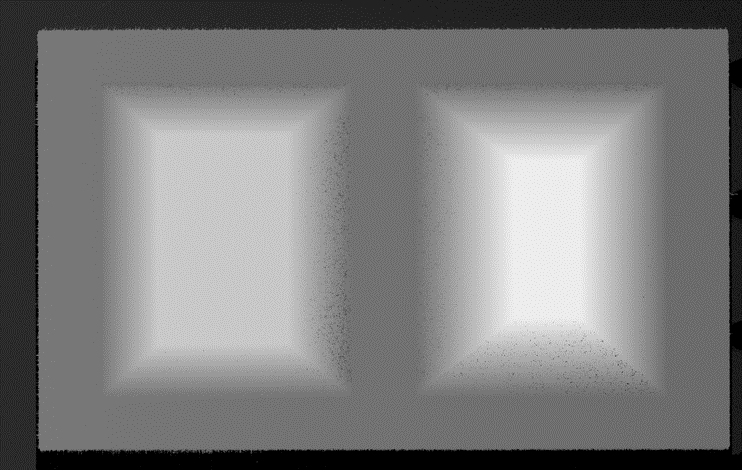
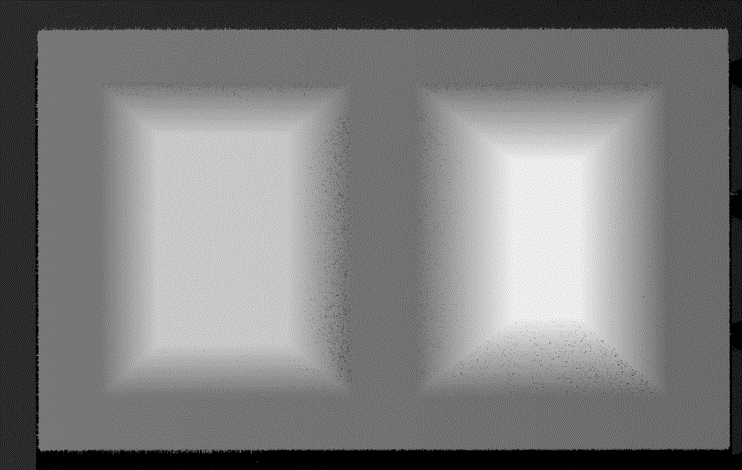
<사진 2> Depth Map Image
3. Point Cloud Data(PCD)
스캔 된 객체를 나타내는 3D 점 좌표의 집합이라고 생각하시면 됩니다.
3D Processing에 사용됩니다.
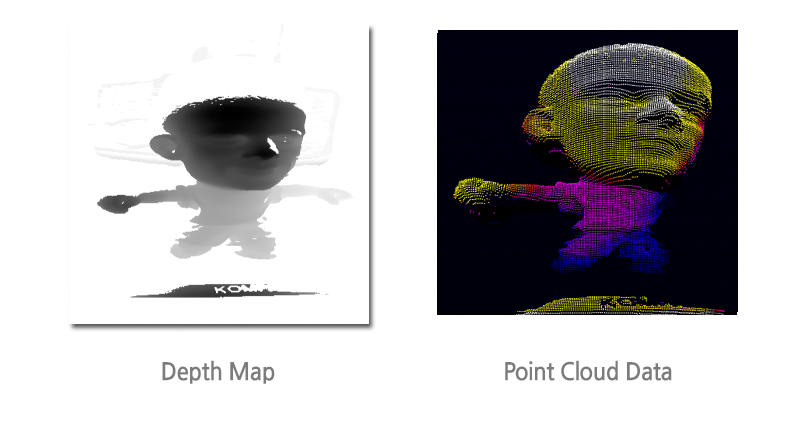
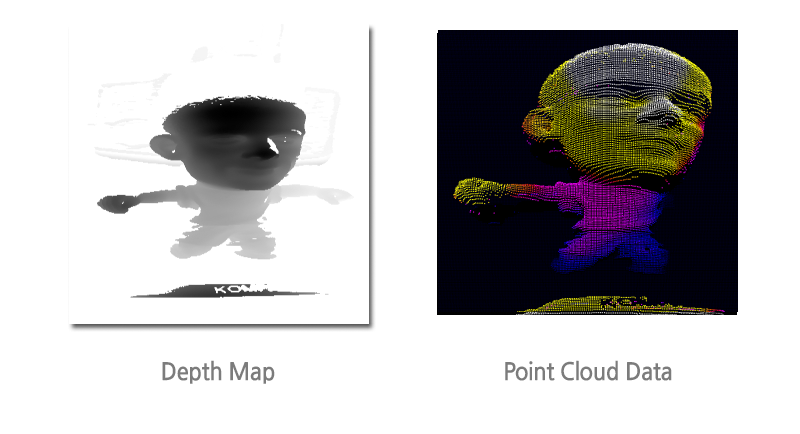
<사진 3> Point Cloud Data(PCD)
4. Mash
3D Point Cloud Data 점들을 연결하여 3D 표현으로 만드는 표현방식입니다.
단어 그대로 그물망처럼 점을 이어 표현하는 방식입니다.
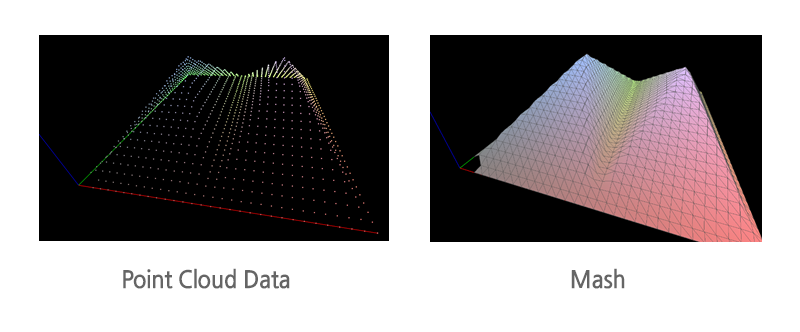
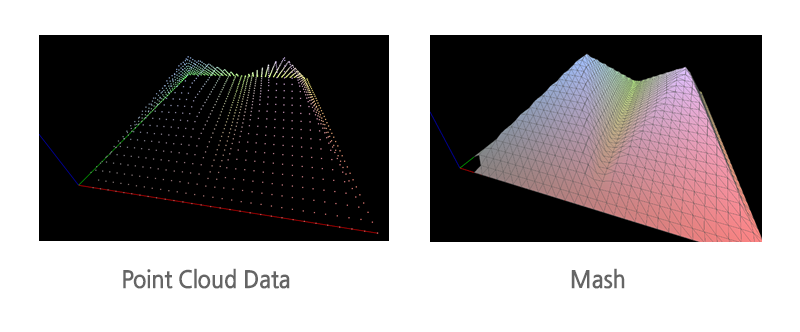
<사진 4> Point Cloud Data 와 Mash 표현
5. ZMap
3D 데이터 표현 방식 중 다른 방식입니다.
2.5D Image라고 부르기도 합니다.
메트릭 및 Calibration이 적용된 이미지이며, 픽셀 값에 물리적 높이 값이 적용되어 있습니다.
ZMap에서는 우리가 일반적으로 사용하는
2D Processing 가능합니다.
<사진 5> ZMap
6. LLE(Line Laser Extraction)
카메라 센서로 획득된 레이저 프로파일로 Depth Map을 생성할 수 있습니다.
LLE 알고리즘에 따라 정확도가 달라질 수 있는 점은 숙지하셔야 합니다.
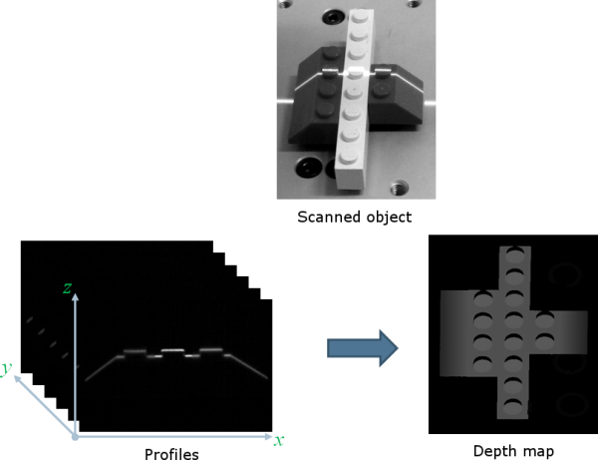
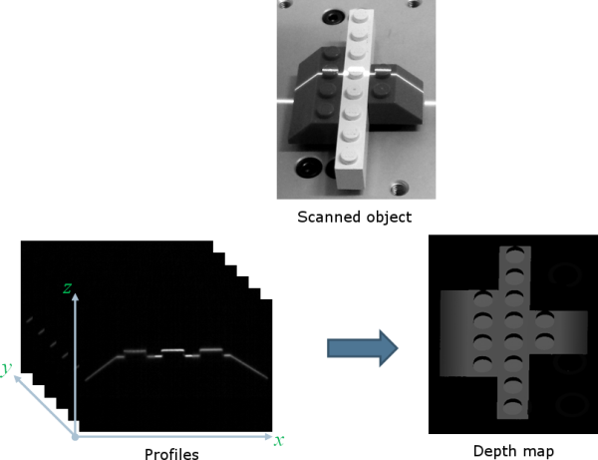
<사진 6> LLE 생성 과정
아래 EURESYS에서 출시한 Coaxlink LLE Framegrabber에 알고리즘이 탑재되어 있습니다.
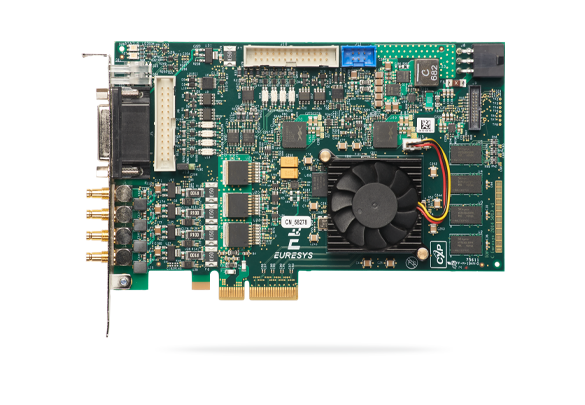
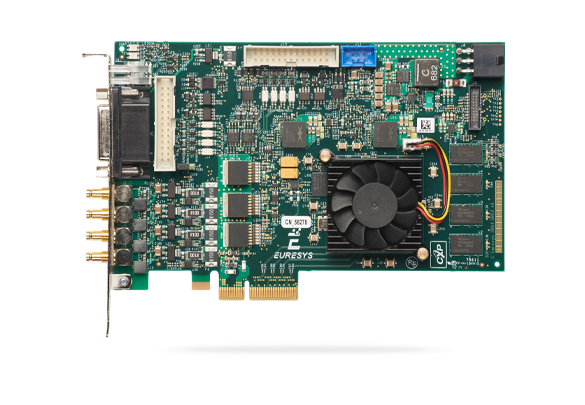
<사진 7> EURESYS Coaxlink Quad 3D-LLE
CoaxPress Interface Camera만 있다면 3D Camera처럼 사용이 가능합니다.
무료 소프트웨어
#머신비전 3D 무료소프트웨어 를 소개해 드릴까 합니다.
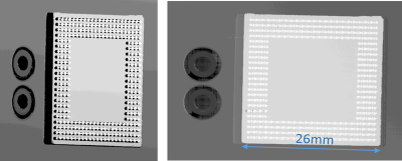
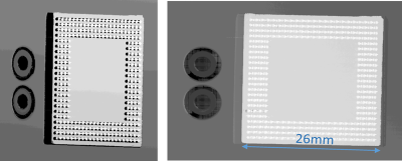
1. ImageJ Software
간단한 이미지 분석이 가능한 무료 소프트웨어이며,
16Bit Image View 가 가능합니다.
실제로 3D Depth Map Image는 16Bit 이미지로 윈도 기본 뷰어에서는 제대로 보이지 않습니다.
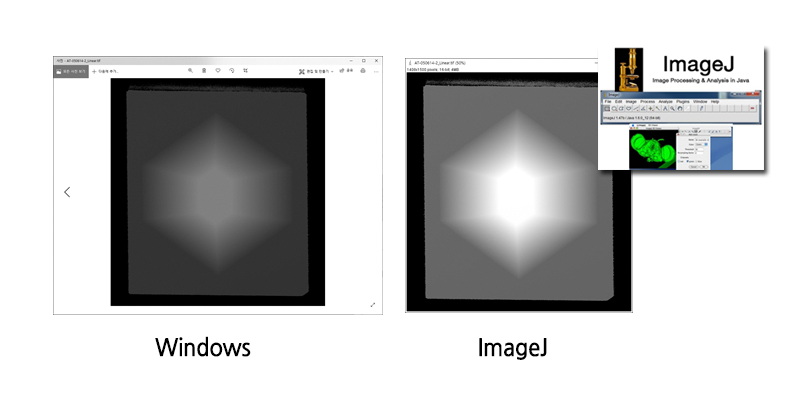
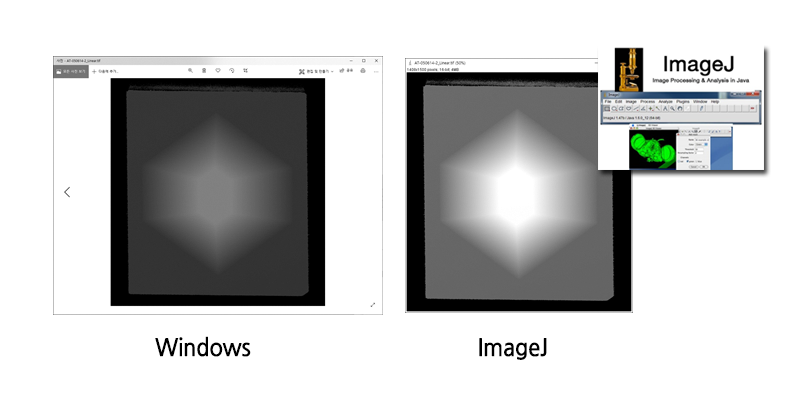
<사진 8> ImageJ 이미지 뷰어 차이
2. CloudCompare Software
3D 포인트 클라우드 데이터 프로세싱 무료 소프트웨어입니다.
3D (Point Cloud Data) 확장자 : .PCD .PLY .CSV .XYZ … 등 지원을 합니다.
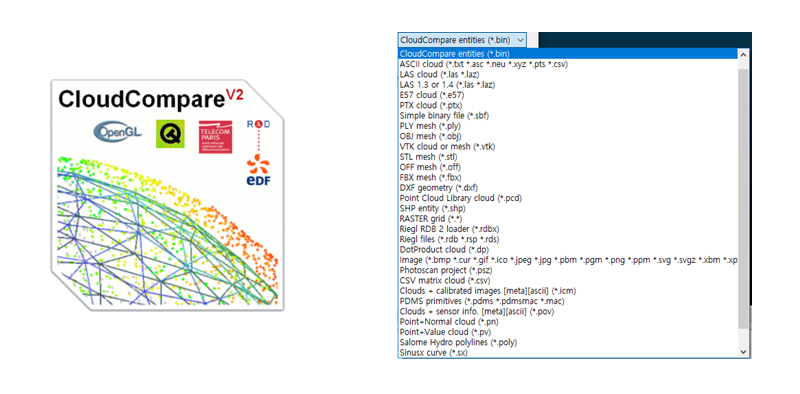
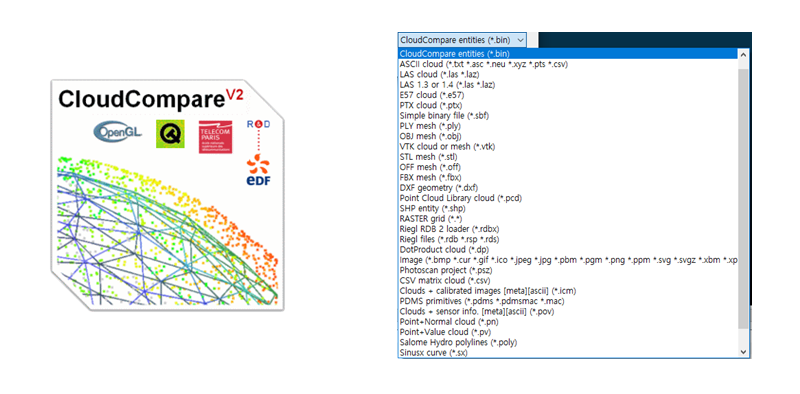
<사진 9> CloudCompare Software
CloudCompare는 3D 포인트 클라우드 프로세싱 소프트웨어입니다.
3D 포인트 클라우드 데이터를 편집하고 랜더링하기 위한 기본 도구 세트를 제공하며
통계 계산, 색상, 거리 측정, 리샘플링 등의 고급 기능도 제공하는 소프트웨어입니다.
오픈소스 프로젝트이며 무료 소프트웨어이기 때문에 누구나 사용할 수 있습니다.
머신비전 3D 검사 기본 용어에 대해 살펴봤습니다.
도움이 되셨길 바라며, 다음 포스팅 때 뵙겠습니다.