

총 16 건
-
 VS Technology의 다양한 어플리케이션 - 실리콘 웨이퍼 이물 검사
VS Technology의 다양한 어플리케이션 - 실리콘 웨이퍼 이물 검사실리콘 웨이퍼 이물 검사 실리콘 웨이퍼에 패터닝 된 회로의 이상 및 이물질 검사의 정확도를 높이기 위한 제품은 VS-THV-SWIR시리즈입니다. VS-THV-SWIR 시리즈 적용 사례 도입전 과제 - 분해능을 높여 검사 정확도를 높이는 것이 목표. - 촬영 영역을 확대해 생산 속도를 높이는 것이 목표. VS-THV-SWIR 평가와 선정 이유 - 최신 고해상도 센서와 호환 가능하며 분해능을 개선함. - SWIR의 높은 투과율로 생산 속도 향상. VS-THV-SWIR 시리즈 요약(이미지 클릭시 제품페이지로 이동) - 1000~1600nm의 투과율 - 근적외선까지 대응 가능한 설계 - 1.1" & 1" 센서 대응 - 1.0x, 1.5x, 2.0x, 3.0x, 4.0x 총 5종의 라인업 - 전 제품 가변 조리개 대응 가능 - 전 제품 동축 조명 대응 가능
2022.08.31 -
 VS Technology의 다양한 어플리케이션 - 유리병 검사 및 치수 검사
VS Technology의 다양한 어플리케이션 - 유리병 검사 및 치수 검사유리병 검사 및 치수 검사 유리병의 외관 검사, 치수 측정과 같은 검사에 추천 드리는 제품은 VS-TLS 시리즈 입니다. VS-TLS 시리즈 적용 사례 도입전 과제 - 유리병은 제작 단계에서 불량률이 높기 때문에 육안으로 검수를 하고 있다. - 육안 검사를 자동화하여 검사 기준을 평준화하는 것이 목표 - 외관 검사 및 치수 측정을 하나의 카메라와 렌즈로 하는 조건 VS-TLS 평가와 선정 이유 - 외관 검사와 치수 측정이 동시에 가능 - 물체의 크기가 달라져도 대응이 가능하여 생산 속도가 향상됨 VS-TLS 시리즈 요약(이미지 클릭시 제품페이지로 이동) - 최대 12MP 1.1인치 센서 대응가능 - 전면 유닛(후면 유닛 재구성 가능) - 3.45um 해상도 - 0.029~0.1배 까지 6종의 라인업 - 후면 유닛 변경으로 배율 변경 가능 - 초점 조정으로 WD 미세 조정 가능 - 저왜곡 설계 - C-Mount
2022.08.31 -
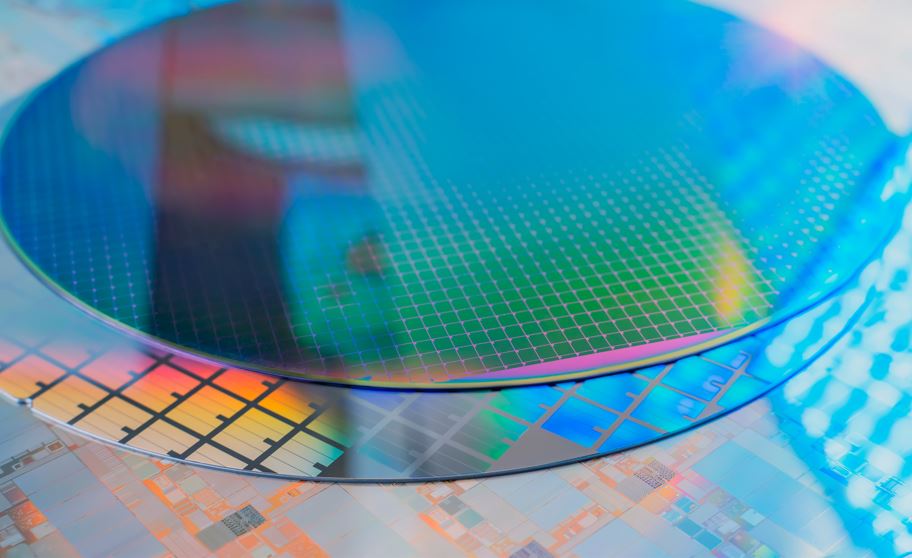
 SWIR 카메라를 통한 머신비전 검사 예시
SWIR 카메라를 통한 머신비전 검사 예시SWIR 카메라를 통한 머신비전 검사 예시 안녕하세요? 화인스텍 마케팅 팀 입니다. 화인스텍 머신비전 블로그를 찾아주셔서 감사합니다. 오늘은 SWIR 카메라를 통한 머신비전 검사 예시에 대해 이야기 해보려고 합니다. 인터넷에도 자료가 많지 않아 작성하는데 어려움이 있었는데 저희 파트너사 Xenix에서 자료를 제공받아 포스팅 하겠습니다. 머신 비전 시스템 제조업체는 고객이 모든 종류의 생산 환경에서 품질 관리를 수행할 수 있는 시스템을 구축하기 위해 오랫동안 일반 Area Scan 카메라에 의존해 왔습니다. 하지만 최근에 SWIR 라인 스캔 카메라의 해상도가 개선되고 가격이 떨어짐에 따라 SWIR 카메라가 제공하는 고유의 장점을 활용하는 새로운 검사 시스템이 많이 개발되고 있습니다. SWIR 카메라는 일반적으로 900~2500nm 사이의 파장대로 일반 카메라로는 확인할 수 없는 파장 특성을 찾을 수 있습니다. 예를 들어 과일과 채소를 분류하고 이물질이 음식과 섞여서 포장된 것을 감지하는 것에 탁월합니다. 고객이 냉동 완두콩을 검사하여 이물질이 없는지 확인해야 하는 농산물 유통 업체라고 가정하겠습니다. 완두콩과 모양, 크기 및 색상이 비슷한 작은 플라스틱 조각이 있는 경우 가시광선을 사용하는 일반 머신 비전 영상으로는 찾아낼 수 없습니다.. 그러나 SWIR 조명은 물에 강력하게 흡수되므로 수분 함량이 높은 냉동 완두콩은 검사 시 이미지에서 완두콩은 매우 어둡게 나옵니다. 수분 함량이 거의 없거나 전혀 없는 플라스틱 조각은 빛을 반사하게 되고 완두콩들 사이에서 돋보이게 되며, 분류기는 공기 제트를 사용하여 파일에서 플라스틱 조각을 걸러낼 수 있습니다. (그림 1 참조) 그림 1. 전형적인 분류 설정에서, 물체는 광원과 SWIR 카메라를 지나 떨어지며, 신속하게 이물질을 식별한 다음, 에어건에 의해 분류됩니다. (Tomra. 이미지 제공) 다른 예로는, 광전지 산업 또한 SWIR 센서의 특성으로부터 이익을 얻을 수 있습니다. 태양 전지 어레이에 들어가는 실리콘 웨이퍼의 내부 결함은 햇빛을 전기로 변환 시켜주는 효율을 심각하게 손상시킬 수 있습니다. 하지만 일반 카메라로는 가시광선을 통해 웨이퍼 표면 만 볼 수 있습니다. 하지만 SWIR 파장에서 웨이퍼는 투명하게 보입니다. 이를 통해 정상적인 육안 검사에서 보이지 않았던 균열을 찾을 수 있습니다. SWIR 라인스캔 카메라 Line Scan 카메라와 Area Scan 카메라의 주요 차이점은 이름에서도 찾을 수 있습니다. Line Scan 카메라 센서는 1행에서 많게는 256행으로 구성되어 스캔 되는 물체의 좁은 선을 이어 붙여 이미지화하는 반면, Area Scan 카메라는 각 프레임에서 훨씬 더 큰 영역을 캡처합니다. 각 픽셀은 물체에서 빛을 흡수하여 전하로 변환하고, 인접한 선은 전체 물체의 이미지에 합산됩니다. 그렇게 하려면 스캐너나 물체가 움직여서 다른 섹션이 센서의 FOV 내에 들어와야 합니다. 이러한 이동으로 볼 때, Line Scan 카메라가 검사 환경에서 컨베이어 벨트를 따라 이동하거나 분류 대상 물체가 통으로 떨어지는 생산 환경에 적합합니다. 예를 들어 과일과 채소는 일반적으로 탐지기를 지나가는데, 이러한 응용 프로그램에는 모션이 포함되어 있기 때문에 Area Scan 카메라에서는 모션으로 인해 생성된 이미지가 흐리게 표시되는 것을 확인할 수 있습니다. Line Scan 이미지는 Area Scan 이미지보다 결함이 있는 픽셀을 포함할 가능성이 적어 원하는 결함있는 픽셀을 숨길 수 있으며 저렴한 가격으로 우수한 해상도를 제공합니다. SWIR 카메라를 선택하는 방법 애플리케이션에 SWIR 이미징을 적용할지 여부를 결정할 때 SWIR 파장에서 눈에 띄는 물체인지를 아는 것이 중요합니다. 라벨 및 바코드와 같은 마킹 검사와 같은 애플리케이션에서는 일반 Area Scan 이미징이 훨씬 저렴한 비용으로 더 나은 작업을 수행하므로 IR 조명을 사용할 필요가 없습니다. 필요한 SWIR 파장을 아는 것이 셋업에 중요한 경우가 많습니다. 어떤 파장이 가장 적합한 지는 용도에 따라 다릅니다. 수분 함량을 기준으로 하는 식품 분류의 경우 사용되는 일반적인 파장은 1450nm이며 물에 매우 강력하게 흡수됩니다. (그림 2 참조) 다른 식품 검사 애플리케이션에는 다른 파장이 필요할 수도 있습니다. SWIR 카메라는 육류의 지방 함량 또는 사과의 타박상과 같은 식품의 여러 측면을 식별하여 주변 영역과 다르게 빛을 반사하거나 흡수하는 데 사용될 수 있습니다. 물고기가 얼마나 신선한 지 측정할 수 있으며, 이물질을 찾는 애플리케이션에도 용이합니다. 예를 들어 분유를 오염시키는 것으로 밝혀진 산업용 화학 물질인 멜라민은 SWIR 조명에서 더 잘 보일 수 있습니다. 그림 2. 가시광선 이미지(오른쪽)에서 다양한 냉동야채(이미지 윗부분)는 다양한 포장지 및 기타 이물질과 모양과 색상이 비슷합니다. SWIR 이미지(왼쪽)에서 음식물은 IR 파장을 흡수하고 이물질은 이를 반사하여 한눈에 그 차이를 알 수 있습니다. (Tomra. 이미지 제공) 오늘날 일반적인 SWIR 카메라는 900-700nm의 빛에 민감한 인듐-갈륨-비소로 만들어진 검출기를 사용합니다. 그러나 일부 애플리케이션에서는 2000~2500nm의 파장이 필요하며, 이를 확장된 SWIR(Extended SWIR)이라고도 부릅니다. 예를 들어, 광산 산업은 때때로 파장이 바뀌기 때문에 특수 제작된 검출기를 필요로 합니다. 실리콘 웨이퍼 검사는 특정 파장이 사용되지 않습니다. 실리콘은 1200 nm 이상의 파장에서 투명하게 보이므로 1200nm 이상에서는 작동합니다. 물론, 작은 결함을 발견하려면 높은 해상도와 종종 고배율이 필요하며, 파장이 짧을수록 해상도가 높고 감지할 수 있는 결함이 작습니다. 시스템의 해상도는 애플리케이션과도 일치해야 하며 시스템 디자이너는 스캐너의 FOV와 찾고자 하는 입자 또는 결함의 크기를 고려하여 이를 파악할 수 있습니다. 일반적으로 과일과 채소에서 이물질을 찾는 애플리케이션에서는 512 픽셀 카메라로도 충분할 수 있습니다. 실리콘 웨이퍼 검사의 경우, 찾는 결함이 더 작으므로 분해능이 높아야 합니다. 그림 3. SWIR 이미징은 실리콘 웨이퍼 표면 아래의 매우 작은 균열을 감지할 수 있습니다. (그림 3 참조) 이러한 시스템에는 2048 픽셀 카메라가 필요할 수 있습니다. 웨이퍼에서 더 작은 결함을 발견하기 위한 비교적 새로운 기술 중 하나는 투과와 반사의 조합인 "transflection"이라는 접근법입니다. 웨이퍼 내부에서 짧은 거리를 투과 한 빛이 반사되고, 도중에 균열에 그림자가 생기면, 그림자 자체가 균열 자체보다 커지며 쉽게 발견할 수 있습니다. 출저: XENICS SWIR Area Camera 모델 센서 CCD/CMOS Mono/Color 메가 해상도 이미지 서클 셀사이즈 프레임 인터페이스 마운트 Bobcat-320-GigE InGaAs CMOS Mono 0.08 320 x 256 1/2" 20 x 20 100 GIGE C Bobcat-320-GigE Gated InGaAs CMOS Mono 0.08 320 x 256 1/2" 20 x 20 400 GIGE C XSW-320- GigE [OEM] InGaAs CMOS Mono 0.08 320 x 256 1/2" 20 x 20 100 GIGE C Bobcat-640-GigE InGaAs CMOS Mono 0.3 640 x 512 1" 20 x 20 100 GIGE C XSW-640- GigE [OEM] InGaAs CMOS Mono 0.3 640 x 512 1" 20 x 20 100 GIGE - XCO-MCT 640-GIGE MCT CMOS Mono 0.3 640 x 512 2/3" 15 x 15 105 GIGE TBD XCO-InSb 640-GIGE InSb CMOS Mono 0.3 640 x 512 2/3" 15 x 15 320 GIGE TBD Serval-640-GigE Microbolometer(a-Si) CMOS Mono 0.3 640 x 480 1" 17 x 17 50 GIGE Fixed Lens Tigris-640-MCT-GIGE MCT CMOS Mono 0.3 640 x 512 2/3" 15 x 15 117 GIGE TBD Tigris-640-InSb-GIGE InSb CMOS Mono 0.3 640 x 512 2/3" 15 x 15 357 GIGE TBD Gobi-640-GigE Microbolometer(a-Si) CMOS Mono 0.3 640 x 480 1" 17 x 17 50 GIGE TBD XTM-640-GigE Microbolometer(a-Si) CMOS Mono 0.3 640 x 480 1" 17 x 17 9 GIGE - Bobcat-320-CL InGaAs CMOS Mono 0.08 320 x 256 1/2" 20 x 20 100 CAMERALINK C Bobcat-320-CL Gated InGaAs CMOS Mono 0.08 320 x 256 1/2" 20 x 20 400 CAMERALINK C XSW-320- CL [OEM] InGaAs CMOS Mono 0.08 320 x 256 1/2" 20 x 20 100 CAMERALINK C Bobcat-640-CL InGaAs CMOS Mono 0.3 640 x 512 1" 20 x 20 100 CAMERALINK C Cheetah-640-CL InGaAs CMOS Mono 0.3 640 x 512 1" 20 x 20 444 CAMERALINK C Cheetah-640CL TE3 InGaAs CMOS Mono 0.3 640 x 512 1" 20 x 20 111 CAMERALINK C XSW-640- CL [OEM] InGaAs CMOS Mono 0.3 640 x 512 1" 20 x 20 100 CAMERALINK - Xeva-1.7-320 InGaAs CMOS Mono 0.08 320 x 256 2/3" 30 x 30 60 CAMERALINK C Xeva-1.7-320 TE3 InGaAs CMOS Mono 0.08 320 x 256 2/3" 30 x 30 60 CAMERALINK C Xeva-1.7-320 VisNIR InGaAs CMOS Mono 0.08 320 x 256 2/3" 30 x 30 60 CAMERALINK C Xeva-1.7-640 InGaAs CMOS Mono 0.3 640 x 512 1" 20 x 20 25 CAMERALINK C Xeva-2.5-320 TE4 InGaAs CMOS Mono 0.08 320 x 256 2/3" 30 x 30 100 CAMERALINK C Xeva-2.35-320 TE4 InGaAs CMOS Mono 0.08 320 x 256 2/3" 30 x 30 100 CAMERALINK C XCO-MCT 640-CL MCT CMOS Mono 0.3 640 x 512 2/3" 15 x 15 105 CAMERALINK TBD XCO-InSb 640-CL InSb CMOS Mono 0.3 640 x 512 2/3" 15 x 15 320 CAMERALINK TBD Tigris-640-MCT-CL MCT CMOS Mono 0.3 640 x 512 2/3" 15 x 15 117 CAMERALINK TBD Tigris-640-InSb-CL InSb CMOS Mono 0.3 640 x 512 2/3" 15 x 15 357 CAMERALINK TBD Gobi-640-CL Microbolometer(a-Si) CMOS Mono 0.3 640 x 480 1" 17 x 17 50 CAMERALINK TBD XTM-640-CL Microbolometer(a-Si) CMOS Mono 0.3 640 x 480 1" 17 x 17 9 CAMERALINK - XSW-320- Samtec [OEM] InGaAs CMOS Mono 0.08 320 x 256 1/2" 20 x 20 100 ANALOG C XSW-320- Analog [OEM] InGaAs CMOS Mono 0.08 320 x 256 1/2" 20 x 20 100 ANALOG C XS-1.7-320 [XS Base] InGaAs CMOS Mono 0.08 320 x 256 2/3" 30 x 30 60 ANALOG C XS-1.7-320 [XS Analog] InGaAs CMOS Mono 0.08 320 x 256 2/3" 30 x 30 50 ANALOG C XS-1.7-320 [XS Trigger] InGaAs CMOS Mono 0.08 320 x 256 2/3" 30 x 30 100 ANALOG C XSW-640- Samtec [OEM] InGaAs CMOS Mono 0.3 640 x 512 1" 20 x 20 100 ANALOG - XSW-640- Analog [OEM] InGaAs CMOS Mono 0.3 640 x 512 1" 20 x 20 25 ANALOG - XTM-640-Analog Microbolometer(a-Si) CMOS Mono 0.3 640 x 480 1" 17 x 17 9 ANALOG - SWIR Linescan Camera 모델 센서 CCD/CMOS Mono/Color K 해상도 이미지 서클 셀사이즈 라인레이트 인터페이스 마운트 Lynx-1024-SQ-GigE InGaAs CMOS Mono 1 1024 x 1 2/3" 12.5 x 12.5 40 GIGE F, C Lynx-2048-SQ-GigE InGaAs CMOS Mono 2 2048 x 1 25.6mm 12.5 x 12.5 10 GIGE F, C Lynx-512-SQ-GigE InGaAs CMOS Mono 0.5 512 x 1 2/3" 25 x 25 40 GIGE F, C Lynx-2048-R-GigE InGaAs CMOS Mono 2 2048 x 1 1.1" 12.5 x 250 10 GIGE F, C Lynx-1024-R-GigE InGaAs CMOS Mono 1 1024 x 1 1" 12.5 x 250 40 GIGE F, C Manx-512-SQ-CXP InGaAs with CTIA ROIC CMOS Mono 0.5 512 x 1 1/3" 12.5 x 12.5 260 COAXPRESS M42, F Manx-1024-SQ-CXP InGaAs with CTIA ROIC CMOS Mono 1 1024 x 1 2/3" 12.5 x 12.5 260 COAXPRESS M42, F Manx-2048-SQ-CXP InGaAs with CTIA ROIC CMOS Mono 2 2048 x 1 25.6mm 12.5 x 12.5 260 COAXPRESS M42, F Lynx-1024-SQ-CL InGaAs CMOS Mono 1 1024 x 1 2/3" 12.5 x 12.5 40 CAMERALINK F, C Lynx-2048-SQ-CL InGaAs CMOS Mono 2 2048 x 1 25.6mm 12.5 x 12.5 10 CAMERALINK F, C Lynx-512-SQ-CL InGaAs CMOS Mono 0.5 512 x 1 2/3" 25 x 25 40 CAMERALINK F, C Lynx-2048-R-CL InGaAs CMOS Mono 2 2048 x 1 1.1" 12.5 x 250 10 CAMERALINK F, C Lynx-1024-R-CL InGaAs CMOS Mono 1 1024 x 1 1" 12.5 x 250 40 CAMERALINK F, C
2022.07.11 -
 3D 머신비전 - 3D 검사의 종류
3D 머신비전 - 3D 검사의 종류머신비전 3D 검사의 종류 안녕하세요? 화인스텍 마케팅 팀 입니다. 화인스텍 블로그를 찾아주셔서 감사합니다. 3D 머신비전-3D 검사의 종류에 대해 포스팅하겠습니다. 3D 머신비전-3D 검사 제품이 많이 나와있습니다. 그렇다면 어떤 방식으로 검사하는지 알아보시죠. <사진 1> 크게 위와 같이 나뉘게 됩니다. 1. CMM (Coordinate Measuring Machine) - 접촉식 첨부된 동영상과 같이 접촉식 3D 검사 방법입니다. 특징 Probe 센서를 물체에 직접 닿게 하여 측정하는 방식 제조업에 오래전부터 이용한 방식 장점 비접촉식에 비해 이물 영향 적음 정밀하고 신뢰성 있는 데이터 대상 물체의 모든 방향 측정 가능 단점 Object의 민감도에 따라 이물, 변형, 파괴 등의 문제 야기 초소형 물체 측정 불가 측정 속도가 매우 느림 2. 광 삼각법 (Light Triangulation) <사진 1> 3D 머신비전-3D 검사 광삼각법 - Automation Technology MCS-1280 특징 보편적으로 사용하는 방식 레이저가 물체에 반사되어 Camera 센서에 노출된 Laser Profile Data를 이용 장점 단순한 광학 조건 (일체형 3D 스캐너) 빠른 측정 속도 단점 Object 재질에 민감함 카메라 또는 물체가 이동 또는 회전해야 함. 3. 공초점 (Confocal) <사진 2> 3D 머신비전-3D 검사 공초점 (Confocal) 방식 특징 광원으로부터 대상과 초점이 맞지 않는 빛은 제거하고 초점이 일치하는 빛만 데이터로 취득 장점 정밀한 높이 및 두께 측정 가능 단점 너무너무너무 느린 취득 속도 4. 모아레 패턴 투영 (Moire) 특징 모아레 패턴(줄무늬)를 이용하여 형상 측정 각 패턴의 형태를 삼각 측정 방식을 이용하여 3D 정보 추출 장점 면적으로 스캔 가능 고속 동작 단점 분해능의 한계 (비용의 증가) 5. ToF (Time of Flight) <사진 4> IFM 3D 카메라 O3D303 <이미지출처 : https://www.ifm.com/kr/ko/product/O3D303?tab=information> 특징 빛을 물체 표면에 조사하여, 빛이 반사되어 돌아오는 시간을 측정하여 거리 계산 한 개의 Pixel에 2개의 Receptor가 존재 <사진5> TOF Image 장점 대형 대상체 측정에 용이 고속 동작 단점 높음 전력 소모 빛 간섭 영향 낮은 높이 분해능의 한계 머신비전 3D 검사의 종류에 대해 알아봤습니다. 어떠신가요? 이해가 잘 되셨기를 바라며, 이번 포스팅은 마치겠습니다.
2022.05.19 -
 머신비전 3D 검사 기본 용어
머신비전 3D 검사 기본 용어3D 기본 교육 - 기본 용어 정리 안녕하세요 화인스텍 마케팅 팀입니다. 화인스텍 블로그를 찾아주셔서 감사합니다. 오늘은 머신비전 3D 검사 기본 용어에 대해 포스팅하겠습니다. 1. 데카르트 좌표 머신비전 3D 검사를 볼 때 가장 기본인 좌표입니다. 데카르트 3D 좌표계라고 하는데 이름은 어렵지만 아래 이미지와 같이 AutoCad 는 물론 3D Tool에서 항상 보던 그 녀석입니다. <사진 1> 데카르트 좌표 X, Y, Z 축의 하나의 점으로 표현하여 위치를 나타냅니다. 2. Depth Map(Height Map, Range Map, 깊이 맵) 이미지의 각 픽셀에 세 번째 좌표가 Gray value로 표현된 2D 이미지입니다. 픽셀 값은 물리적 높이 값이 아닌, 광 삼각 측량의 레이저 라인 프로파일의 변위를 나타내고 Calibration 단계를 거쳐 Point Cloud, ZMap으로 변환하는데 사용됩니다. Depth Map은 아래와 같은 이미지입니다. <사진 2> Depth Map Image 3. Point Cloud Data(PCD) 스캔 된 객체를 나타내는 3D 점 좌표의 집합이라고 생각하시면 됩니다. 3D Processing에 사용됩니다. <사진 3> Point Cloud Data(PCD) 4. Mash 3D Point Cloud Data 점들을 연결하여 3D 표현으로 만드는 표현방식입니다. 단어 그대로 그물망처럼 점을 이어 표현하는 방식입니다. <사진 4> Point Cloud Data 와 Mash 표현 5. ZMap 3D 데이터 표현 방식 중 다른 방식입니다. 2.5D Image라고 부르기도 합니다. 메트릭 및 Calibration이 적용된 이미지이며, 픽셀 값에 물리적 높이 값이 적용되어 있습니다. ZMap에서는 우리가 일반적으로 사용하는 2D Processing 가능합니다. <사진 5> ZMap 6. LLE(Line Laser Extraction) 카메라 센서로 획득된 레이저 프로파일로 Depth Map을 생성할 수 있습니다. LLE 알고리즘에 따라 정확도가 달라질 수 있는 점은 숙지하셔야 합니다. <사진 6> LLE 생성 과정 아래 EURESYS에서 출시한 Coaxlink LLE Framegrabber에 알고리즘이 탑재되어 있습니다. <사진 7> EURESYS Coaxlink Quad 3D-LLE CoaxPress Interface Camera만 있다면 3D Camera처럼 사용이 가능합니다. 무료 소프트웨어 #머신비전 3D 무료소프트웨어 를 소개해 드릴까 합니다. 1. ImageJ Software 간단한 이미지 분석이 가능한 무료 소프트웨어이며, 16Bit Image View 가 가능합니다. 실제로 3D Depth Map Image는 16Bit 이미지로 윈도 기본 뷰어에서는 제대로 보이지 않습니다. <사진 8> ImageJ 이미지 뷰어 차이 2. CloudCompare Software 3D 포인트 클라우드 데이터 프로세싱 무료 소프트웨어입니다. 3D (Point Cloud Data) 확장자 : .PCD .PLY .CSV .XYZ … 등 지원을 합니다. <사진 9> CloudCompare Software CloudCompare는 3D 포인트 클라우드 프로세싱 소프트웨어입니다. 3D 포인트 클라우드 데이터를 편집하고 랜더링하기 위한 기본 도구 세트를 제공하며 통계 계산, 색상, 거리 측정, 리샘플링 등의 고급 기능도 제공하는 소프트웨어입니다. 오픈소스 프로젝트이며 무료 소프트웨어이기 때문에 누구나 사용할 수 있습니다. 머신비전 3D 검사 기본 용어에 대해 살펴봤습니다. 도움이 되셨길 바라며, 다음 포스팅 때 뵙겠습니다.
2022.05.17 -
 머신비전의 기본 구성
머신비전의 기본 구성머신비전 기본 구성 안녕하세요 화인스텍 마케팅 팀입니다. 화인스텍 블로그를 찾아주셔서 감사합니다. 머신비전 구성은 어떻게 이루어 질까요? 우리가 흔하게 접하는 DSLR 과는 많이 다른 카메라와 렌즈, 그리고 이미지를 PC에서 받을 수 있도록 하는 프레임 그래버 등 여러가지 구성으로 되어있습니다. 그림으로 간단하게 표현해볼까요? <그림 1> 머신비전의 구성 기본 구성은 이미 여러분이 알고 있는 그 구성입니다. 조명, 카메라, 렌즈, PC 보드(Frame Grabber, NIC 등), 모니터.... 단지 생김새가 조금 다를 뿐 이미 우리가 접하고 있는 물건들입니다. 차이가 있다면, 카메라는 PC 없이는 이미지를 저장할 수가 없어요. 카메라 안에 저장 공간이 없습니다. 전문 엔지니어가 직접 코딩을 해서 이미지를 저장하고 "그 이미지를 검사해야 합니다" 뭐하나 중요하지 않은 것은 없지만 제 지극히 개인적인 생각으로는 조명이 가장 중요하다고 생각합니다. 머신비전 기본 구성에 대해서 알아봤습니다. 다음 포스팅에는 아주 기본적인 용어를 보도록 하겠습니다.
2022.03.17




