

Bin Picking Studio - 다양한 용도로 활용할 수 있는 로봇 지능 소프트웨어
2024-05-31
Bin Picking Studio
가장 다양한 용도로 활용할 수 있는 로봇 지능 소프트웨어
ㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡ
작동방식

ㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡ
로봇 선택
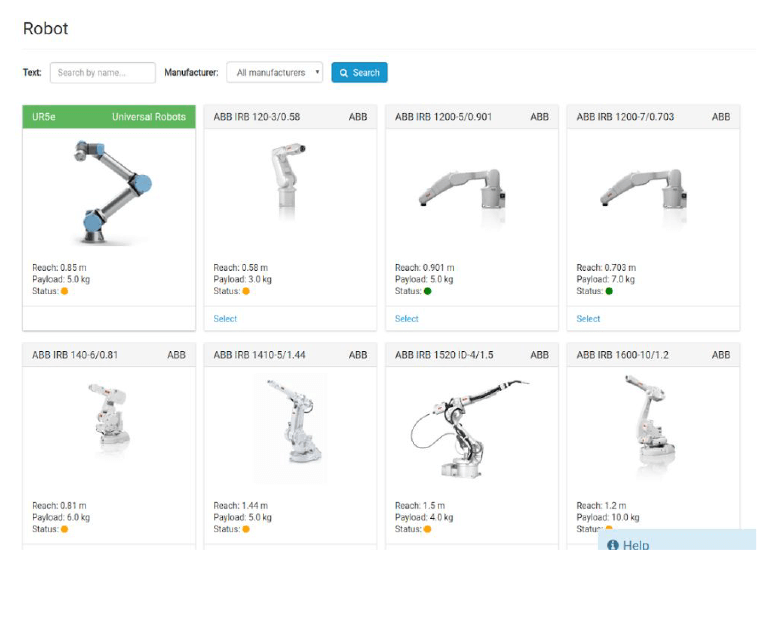
포토네오는 다양한 회사의 프로젝트를 위해 지속적으로 로봇 데이터베이스를 개발했습니다.
이를 통해 포토네오는 다양한 브랜드에서 많은 수의 로봇 모델을 지원해왔으며
목록에 원하는 로봇이 없는 경우에도 소통을 통하여 문제를 해결해왔습니다.
이로인해 다양한 로봇이 Bin Picking Studio에 통합되어 활용되었습니다.
그리퍼 업로드
그리핑 도구의 CAD 모델을 업로드하며 그리퍼 모델이 가상 환경에서 도구 포인트 구성에 사용됩니다.
개체 업로드
Bin Picking 그리핑 포인트 계획을 시작할 때는 선택하려는 제품의 CAD 모델만 있으면 됩니다.
Bin Picking Studio에 업로드하면 가상 환경에서 즉시 작업을 시작할 수 있습니다
Set up gripping & tool points
Bin Picking 설정은 그리퍼가 물체를 잡는 위치와 방법을 선택하는 것으로 시작됩니다.
간단한 시각적 공정 덕분에 복잡한 수학이 필요하지 않으며 Bin Picking Studio는 이 작업을 원활하게 지원합니다.
환경 로드
환경로드 단계에서는 Bin Picking Studio에 피킹이 이루어지는 위치를 알려줍니다.
피킹 셀의 CAD 모델을 로드하여 가능한 가장 쉬운 방법으로 작업을 다시 수행합니다.
업로드 직후 Studio는 작업에 사용할 수 있는 3D 시각화 정보를 제공합니다.
품 위치 파악 설정

Bin Picking Studio는 부품 위치를 파악하는 알고리즘을 셋팅하기 위한 내장 엔진이 구현 되어있습니다.
CAD 매칭 방식을 기반으로 한 이 알고리즘은 빠른 속도와 견고성에 중점을 둔 빈 피킹에 적합하도록 개발되었습니다.
카메라에 대한 로봇 보정
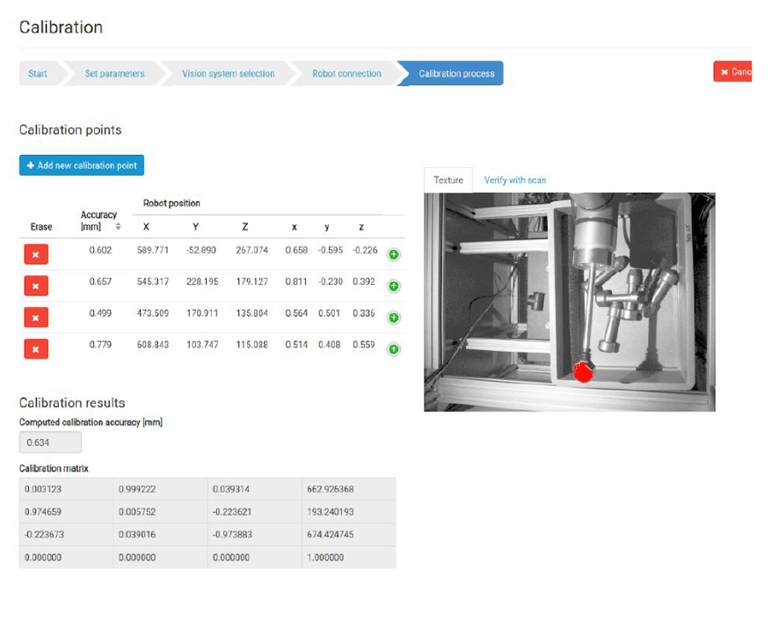
Photoneo의 Bin Picking Studio는 특별하게 준비해야 하는 보정 시트가 필요하지 않습니다.
구 모양의 원형 물체 하나로 가시적인 안내 프로그램에 따라 스캐너와 로봇을 보정하고 동기화합니다.
이로 인해 보정 전체에 걸쳐 검증하고 평가할 수 있는 시각적 피드백을 즉시 받습니다.
대화형 디버깅
마지막으로 가상 환경 내에서의 최첨단 디버깅 툴을 활용하세요.
이를 통해 솔루션이 얼마나 잘 준비되었는지 확인할 수 있습니다.
20분 만에 로봇 지능 설정

피킹 프로젝트를 위한 완벽한 솔루션

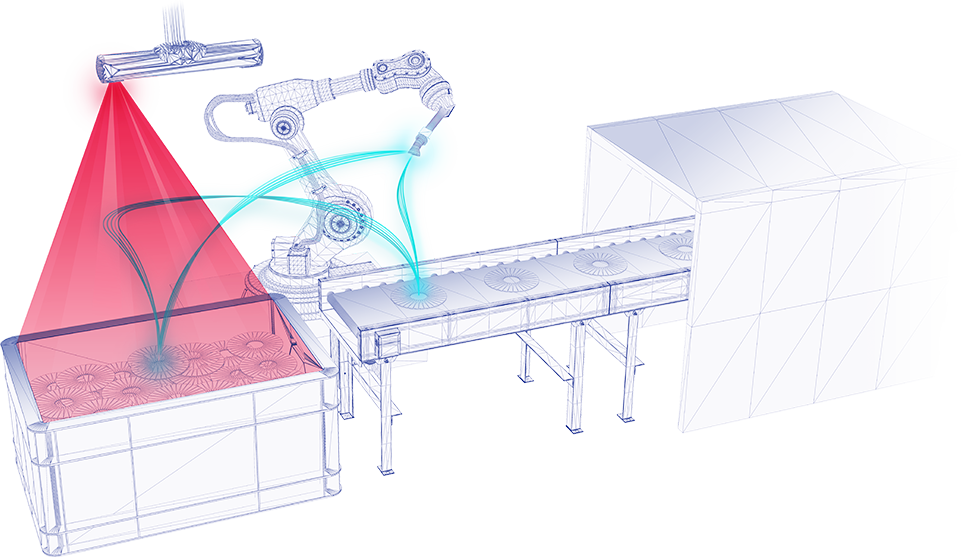
Bin Picking Studio는 PhoXi 스캐너라인으로 대표되는 강력한 3D 비전 하드웨어와 피킹의 셋팅을 위한 통합 소프트웨어의의 결합입니다.
4개의 공급업체에서 찾아야 할 것을 우리는 올인원 피킹 솔루션으로 하나의 패키지로 제공합니다.

Bin Picking Studio 이점


