SENTECH_CL_라인스캔 카메라 동작 방법(Encoder)
2022-10-27
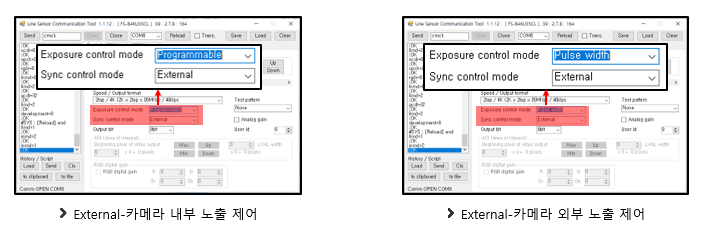
1.카메라 설정 ( 트리거 모드 설정 방법)
카메라 촬영 신호 - 프레임그래버에서 / 카메라 노출 제어 - 카메라에서
Synchronization mode : External
Exposure mode : Programmable
카메라 촬영 신호 - 프레임그래버에서 / 카메라 노출 제어 - 프레임그래버에서
Synchronization mode : External
Exposure mode : Pulse Width
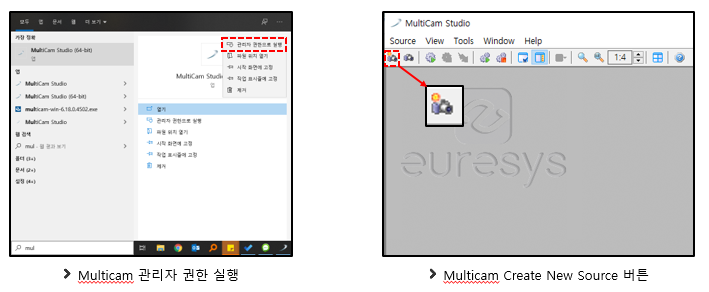
2. Multicam Camfile 열기-RG(Encoder) Camfile
Multicam Studio를 관리자 권한으로 실행합니다.
Multicam Studio의 가장 좌 상단에 위치한  을 클릭합니다.
을 클릭합니다.
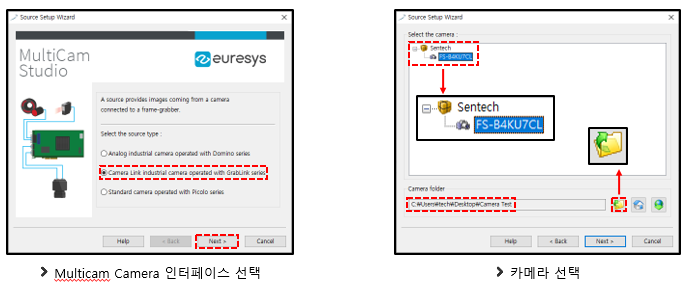
Camera Link 인터페이스 라디오 버튼을 선택 후  버튼을 클릭합니다.
버튼을 클릭합니다.
 아이콘을 클릭하여 Camfile이 있는 경로를 선택합니다.
아이콘을 클릭하여 Camfile이 있는 경로를 선택합니다.
제조사 하위에 있는 카메라 모델명을 선택하고
버튼을 클릭합니다.
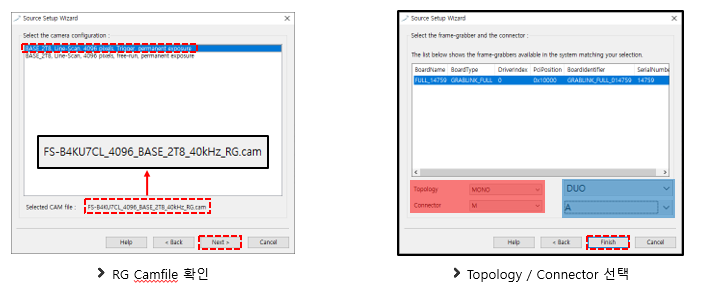
Camfile을 선택 및 하단에 표기된 Camfile 이름을 확인 후 버튼을 클릭합니다.
보드의 종류에 따른 Topology / Connector 선택
Full / Base : Topology -> Mono / Connector -> M
DualBase : Topology -> Duo / Connector -> A 또는 B
설정을 모두 마치고  버튼을 누르면 Camfile이 열립니다.
버튼을 누르면 Camfile이 열립니다.
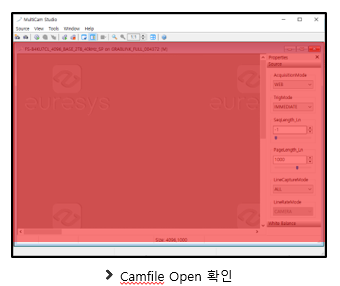
Camefile Open 확인
하단 이미지에 붉은 영역으로 표기된 영역과 같이 Camfile이 Open 됬는지 확인합니다.
3. Encoder 동작 모드 설정 (Period / Pulse /Convert)
PERIOD 모드
프레임그레버에서 촬영 신호를 설정된 주기만큼 일정하게 생성 및 전송
전송받은 신호로 카메라는 주기적으로 이미지 취득
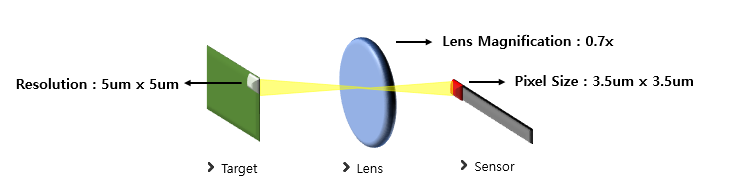
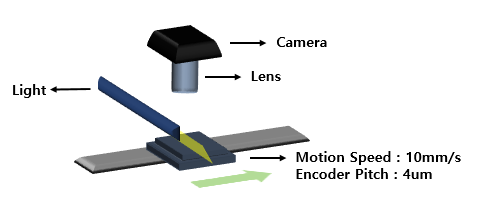
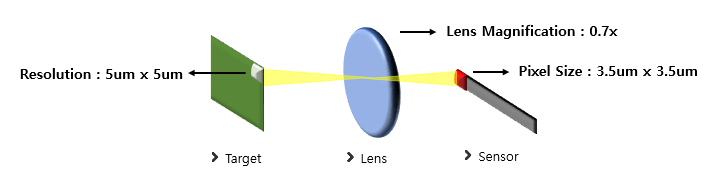
카메라 설정 예시를 들기 위해 임의의 사양 지정
Pixel size(카메라 픽셀 사이즈) : 3.5um x 3.5um
Lens magnification(렌즈 배율) : 0.7x
Resolution(실제 분해능) 3.5um(카메라 픽셀 사이즈) / 0.7(렌즈 배율) = 5um
광학계 사양 및 파라미터값 계산 (Period)
카메라 설정 예시를 들기 위해 임의의 사양 지정
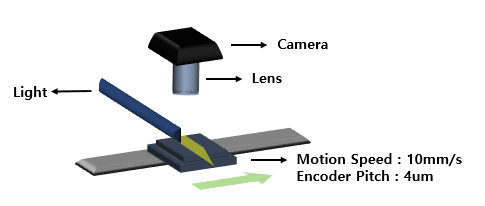
Motion Speed(모션 속도) : 10mm/sLine
interval(촬영 주기) : 5um(실제 분해능) / 10mm/s(모션 속도) = 500us
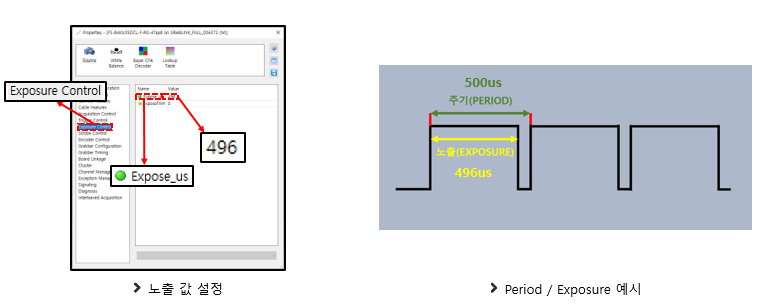
Exposure time(노출) : 500us(촬영 주기) – 4us(Offset Time) = 496us 이하
카메라가 이미지 취득 후 다음 동작을 위해서 Offset Time이 필요하며, 센서 종류 또는 카메라 제조사마다 값이 상이합니다.
Encoder Pitch : 4um
Encoder 1 pluse 당 모션이 이동하는 거리로서 Encoder 성능에 따라 달라집니다.
Line Pitch (=Resolution): 4um
현재 라인과 다음 라인의 물리적인 간격을 의미하며 1:1 영상을 맞추기 위해 실제 분해능 값과 동일합니다.
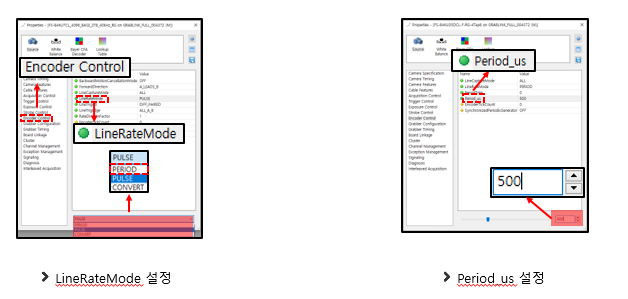
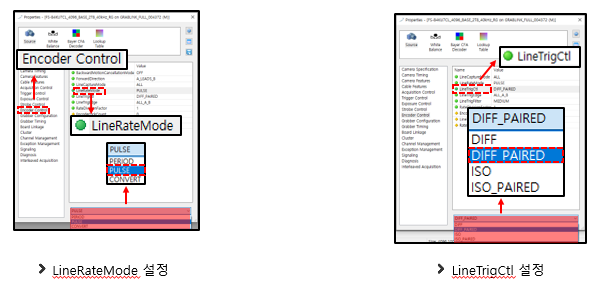
Multicam 파라미터 설정 (PERIOD)
 카테고리
카테고리
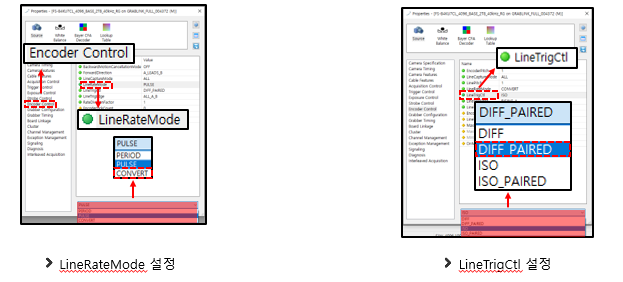
 파라미터를 를 PERIOD 모드로 변경합니다.
파라미터를 를 PERIOD 모드로 변경합니다.
 를 500us (Line Inteval) 값으로 설정합니다.
를 500us (Line Inteval) 값으로 설정합니다.
 카테고리
카테고리
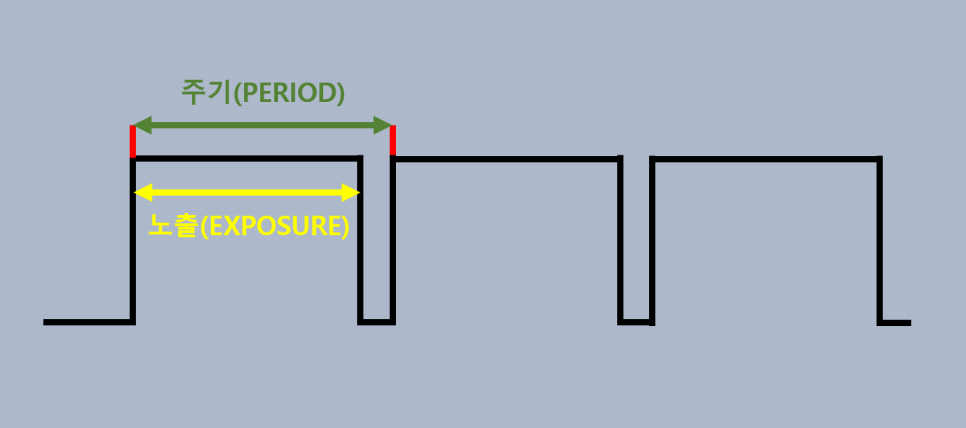
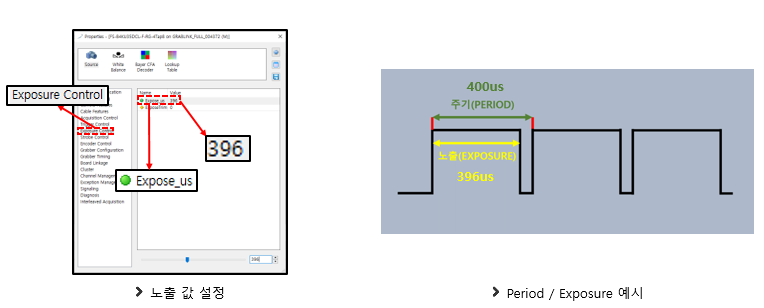
 에 사용하고자 하는 Exposure 값을 입력합니다.
에 사용하고자 하는 Exposure 값을 입력합니다.
설정한 Expose_us 만큼 카메라로 Pulse가 전송됩니다.
단, Expose_us에 설정한 노출 값은 카메라의 설정이 Pulse Width 모드에서만 적용됩니다.
(카메라 내부 노출 제어 설정 시 트리거 신호로만 인식함)

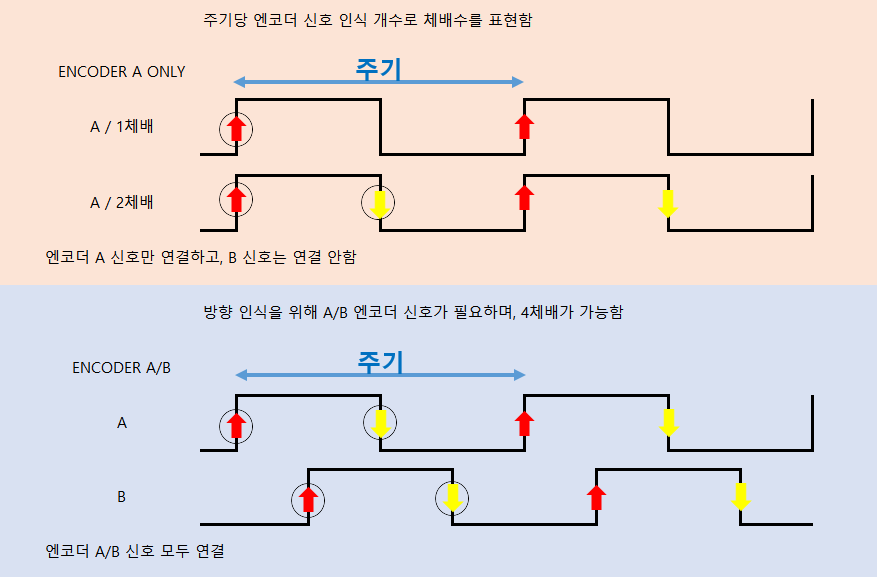
Encoder 체배 신호 설명
Encoder Pitch 4um 기준 예시
1 체배 신호
A 상의 Rising Edge 또는 Falling Edge 신호를 사용하며, Encoder의 A 상 신호가 4um 이동마다 발생하며,
항상 A 상의 Rising Edge 또는 Falling Edge만 사용하므로 신호의 발생 간격은 4um입니다.
2 체배 신호
A 상의 Rising Edge와 Falling Edge 신호를 사용하며, Encoder A 상 신호가 4um 이동마다 발생하며,
항상 A 상의 Rising Edge와 Falling Edge 모두 사용하므로 신호의 발생 간격은 Encoder Pitch 값의 ½인 2um입니다.
4 체배 신호
A 상과 B 상의 Rising Edge와 Falling Edge 신호를 모두 사용하며, Encoder A 상 신호가 4um 이동마다 발생하며,
항상 A 상과 B 상의 Rising Edge와 Falling Edge 모두 사용하므로 신호의 발생 간격은 Encoder Pitch 값의 ¼인 1um입니다.
광학계 사양 및 파라미터 값 계산 (Pulse)
PULSE 모드프레임그레버에서 외부 신호를 받아서 촬영(DIN Input 또는 IIN Input)
RateDivisionFactor 파라미터를 이용하여 입력 신호에 대한 촬영 비율을 조정 가능
카메라 설정 예시를 들기 위해 임의의 사양 지정
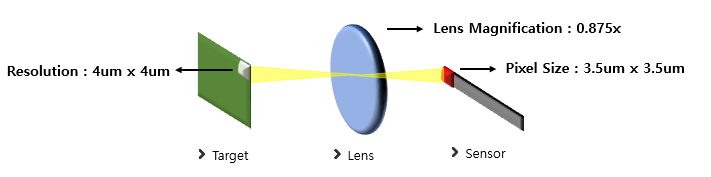
Pixel size(카메라 픽셀 사이즈) : 3.5um x 3.5um
Lens magnification(렌즈 배율) : 0.875x
Resolution(실제 분해능) 3.5um(카메라 픽셀 사이즈) / 0.875(렌즈 배율) = 4um x 4um
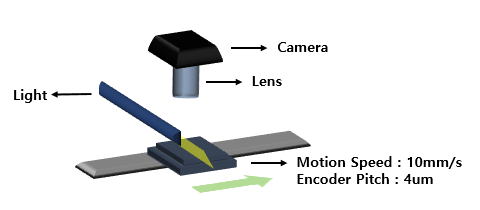
카메라 설정 예시를 들기 위해 임의의 사양 지정
Motion Speed(모션 속도) : 10mm/s
Line interval(촬영 주기) : 4um(실제 분해능) / 10mm/s(모션 속도) = 400us
Exposure time(노출) : 400us(촬영 주기) – 4us(Offset Time) = 396us 이하
카메라가 이미지 취득 후 다음 동작을 위해서 Offset Time이 필요하며, 센서 종류 또는 카메라 제조사마다 값이 상이합니다.
Encoder Pitch : 4um
Encoder 1 Pulse 당 모션이 이동하는 거리로서 Encoder 성능에 따라 달라집니다.
Line Pitch(=Resolution) : 4um
현재 라인과 다음 라인의 물리적인 간격을 의미하며 1:1 영상을 맞추기 위해 실제 분해능 값과 동일합니다.
광학계 사양 및 파라미터 값 계산 (Pluse)
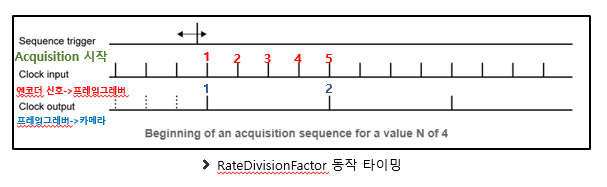
RateDivisionFactor : 입력된 값 N에 대하여 N-1 개의 펄스를 무시합니다.
5 입력시 첫 촬영 후 5-1 = 4개의 신호를 무시 후 다음 펄스를 발생 시킵니다.
정수 단위만 입력 가능하며, 입력 할 수 있는 범위는 1~512입니다.
Encoder Pitch는 A상과 B상의 1,2,4 체배 신호에 따라 입력 값이 달라집니다.
Multicam 파라미터 설정 (Pluse)
 카테고리
카테고리
 파라미터를 를 Pulse 모드로 변경합니다.
파라미터를 를 Pulse 모드로 변경합니다.
 은 DIFF 또는 DIFF_PAIRED를 사용합니다. (신호 종류가 LVDS가 아닐 시 ISO 사용)
은 DIFF 또는 DIFF_PAIRED를 사용합니다. (신호 종류가 LVDS가 아닐 시 ISO 사용)
DIFF(A 상 또는 A, B 상 신호 선택하여 연결 가능)
1체배, 2체배, 4 체배 신호 모두 사용 가능.
역방향 스캔 시 이미지 취득을 금지할 수 있는 기능을 사용할 수 없습니다.
DIFF_PAIRED(A, B 상 신호 모두 연결해야 사용 가능)
1체배, 2체배, 4 체배 신호 모두 사용 가능.
역방향 스캔 시 이미지 취득을 금지할 수 있는 기능을 사용할 수 있습니다.
Multicam 파라미터 설정 (Pluse)
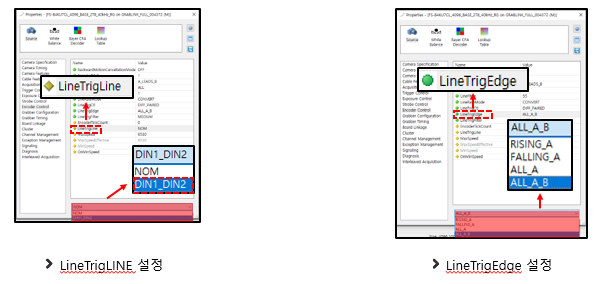
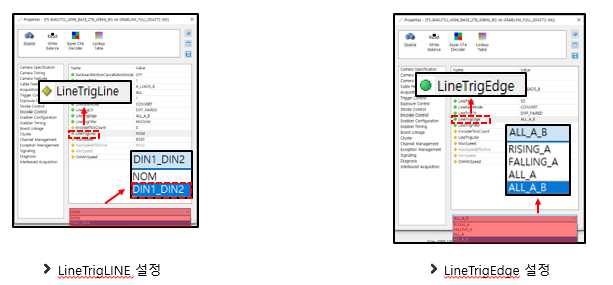
 파라미터를 DIN1_DIN2로 설정합니다.(4 체배 신호 사용 시)
파라미터를 DIN1_DIN2로 설정합니다.(4 체배 신호 사용 시)
 파라미터를 설정합니다.
파라미터를 설정합니다.
A상의 상승 Edge만 촬영 신호로 사용하는 경우 -> RISING_A
Encoder Pitch가 4um인 경우 -> 4um마다 펄스 인식
A상의 하강 Edge만 촬영 신호로 사용하는 경우 -> FALLING_A
Encoder Pitch가 4um인 경우 -> 4um마다 펄스 인식
A상의 상승 / 하강 Edge 모두 촬영 신호로 사용하는 경우 -> ALL_A
Encoder Pitch가 4um인 경우 -> 2um마다 펄스 인식
A상, B상의 상승 / 하강 Edge 모두 촬영 신호로 사용하는 경우 -> ALL_A
BEncoder Pitch가 4um인 경우 -> 1um마다 펄스 인식
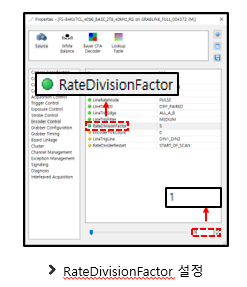
카메라의 촬영 주기를 맞춰주기 위하여 PULSE모 모드에서는 RateDivisionFactor 파라미터를 사용합니다.
RateDivisionFactor 값 설정
Line Pitch(=Resolution) : 4um / Encoder Pitch : 4um
LineTrigEdge가 Rising A시 -> 4um /4um = 1
LineTrigEdge가 Falling A 시 -> 4um /4um = 1
LineTrigEdge가 ALL_A 시 ->4um / 2um = 2
LineTrigEdge가 All_A_B 시 ->4um / 1um = 4
 카테고리
카테고리
 에 사용하고자 하는 Exposure 값을 입력합니다.
에 사용하고자 하는 Exposure 값을 입력합니다.
설정한 Expose_us 만큼 카메라로 Pluse가 전송됩니다.
단, Expose us 에서 설정한 노출 값은 카메라의 설정이 Pluse Width 모드에서만 적용됩니다.
(카메라 내부 노출 제어 설정 시 트리거 신호로만 인식함)
광학계 사양 및 파라미터 값 계산 (Covnert)
Convert 모드
프레임 그레버에서 외부 신호를 받아서 촬영 (Din Input 또는 IIN Input)
PLUSE 모드에서 사용하는 RateDivisionFactor 파라미터 계산 시 정수 형태로 계산되지 않는 경우 사용
Line Pitch와 Encoder Pitch 비율을 입력하여 동작 제어 가능 (RateCovnerter)
카메라 설정 예시를 들기 위해 임의의 사양 지정
Pixel size (카메라 픽셀 사이즈) : 3.5um x 3.5um
Lens Magnification (렌즈 배율) : 0.7x
Resolution (실제 분해능 ) : 3.5um (카메라 픽셀 사이즈) / 0.7 (렌즈배율) = 5um x 5um
카메라 설정 예시를 들기 위해 임의의 사양 지정
Motion Speed (모션속도) : 10mm/s
Line unterval (촬영주기) : 5um (실제 분해능) / 10mm/s (모션속도) = 500us
Exposure Time (노출) 500us(촬영 주기 ) - 4us (Offset Time) = 496us 이하
카메라 이미지 취득 후 다음 동작을 위해서 Offset Time이 필요하며 , 센서 종류 또는 카메라 제조사마다 값이 상이함.
Encoder Pitch : 4um
Encoder 1 Pulse 당 모션이 이동하는 거리로서 Encoder 성능에 따라 달라집니다.
Line Pitch(=Resolution) : 5um
현재 라인과 다음 라인의 물리적인 간격을 의미하며 1:1 영상을 맞추기 위해 실제 분해능 값과 동일힙니다.
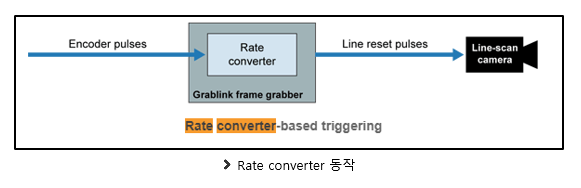
RateConverter : 입력된 펄스의 비율을 조절하여 카메라로 출력합니다.
Convert Mode 의 파라미터인 Line Pitch와 Encoder Pitch에 입력된 값으로 출력 펄스의 비율을 조절합니다.
Multicam 파라미터 설정 (Convert)
 카테고리
카테고리
 파라미터를 를 Pulse 모드로 변경합니다.
파라미터를 를 Pulse 모드로 변경합니다.
 은 DIFF 또는 DIFF_PAIRED를 사용합니다. (신호 종류가 LVDS가 아닐 시 ISO 사용)
은 DIFF 또는 DIFF_PAIRED를 사용합니다. (신호 종류가 LVDS가 아닐 시 ISO 사용)
DIFF(A 상 또는 A, B 상 신호 선택하여 연결 가능)
1체배, 2체배, 4 체배 신호 모두 사용 가능.
역방향 스캔 시 이미지 취득을 금지할 수 있는 기능을 사용할 수 없습니다.
DIFF_PAIRED(A, B 상 신호 모두 연결해야 사용 가능)
1체배, 2체배, 4 체배 신호 모두 사용 가능.
역방향 스캔 시 이미지 취득을 금지할 수 있는 기능을 사용할 수 있습니다.
Multicam 파라미터 설정 (Convert)
 파라미터를 DIN1_DIN2로 설정합니다.(4 체배 신호 사용 시)
파라미터를 DIN1_DIN2로 설정합니다.(4 체배 신호 사용 시)
 파라미터를 설정합니다.
파라미터를 설정합니다.
A상의 상승 Edge만 촬영 신호로 사용하는 경우 -> RISING_A
Encoder Pitch가 4um인 경우 -> 4um마다 펄스 인식
A상의 하강 Edge만 촬영 신호로 사용하는 경우 -> FALLING_A
Encoder Pitch가 4um인 경우 -> 4um마다 펄스 인식
A상의 상승 / 하강 Edge 모두 촬영 신호로 사용하는 경우 -> ALL_A
Encoder Pitch가 4um인 경우 -> 2um마다 펄스 인식
A상, B상의 상승 / 하강 Edge 모두 촬영 신호로 사용하는 경우 -> ALL_A_B
BEncoder Pitch가 4um인 경우 -> 1um마다 펄스 인식
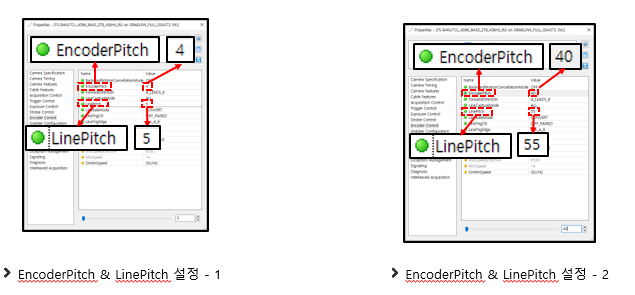
카메라의 촬영 주기를 맞춰주기 위하여 Convert 모드 에서는 EncoderPitch와 LinePitch 파라미터를 사용합니다.
LinePitch : 5um (정수) / Encoder pitch : 4um(정수)
숫자 그대로 입력 (좌측 하단 이미지 참고)
LinePitch : 5.5um(소수) / Encoder Pitch : 4um (정수)
소수 단위를 입력할 수 없지만 정수 비가 되도록 배수로 설정하면 비율이 계산되어 이미지가 취득됩니다.
(우측하단 이미지 참고)
 카테고리
카테고리
 에 사용하고자 하는 Exposure 값을 입력합니다.
에 사용하고자 하는 Exposure 값을 입력합니다.
설정한 Expose_us 만큼 카메라로 Pulse가 전송됩니다.
단, Expose_us에 설정한 노출 값은 카메라의 설정이 Pulse Width 모드에서만 적용됩니다.
(카메라 내부 노출 제어 설정시 트리고 신호로만 인식함)
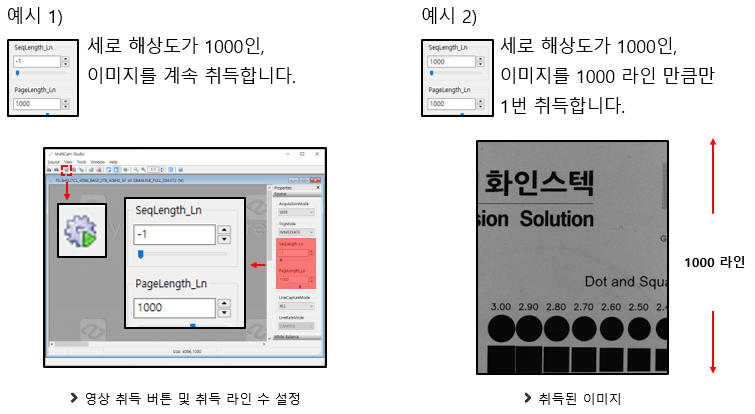
4. 카메라 영상 취득
MultiCam 상단의  Acquisition Start 버튼을 클릭합니다.
Acquisition Start 버튼을 클릭합니다.
SeqLength_Ln : 취득할 라인 수를 설정합니다.
PageLength_Ln : 이미지 버퍼의 세로 해상도를 설정합니다.
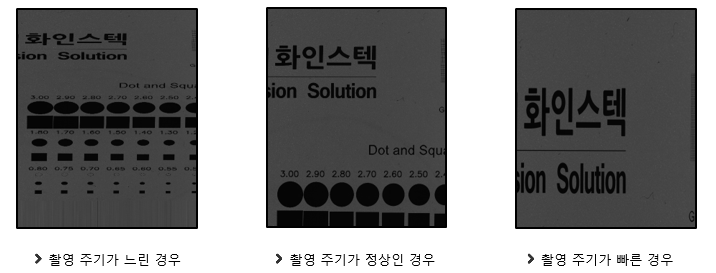
5. 영상 취득시 주의 사항
( 파라미터 설정 및 신호 입력에 따른 영상 비율 변화)
영상 비율 문제
영상 비율이 맞지 않는 경우
파라미터 설정이 잘못 된 경우
Line Pitch (Resolution) 또는 Encoder Pitch가 실제 사양과 다른경우
I/O 케이블이 잘못 제작된 경우
Encoder 신호 출력 자체가 문제가 있는 경우